

Close-range geometric obstacle avoidance method of wing fixed unmanned aerial vehicle (UAV)
An unmanned aerial vehicle, short-distance technology, applied in the direction of radio wave measurement system, radio wave reflection/re-radiation, measurement device, etc., to achieve the effect of easy operation, high reliability and quick response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] A specific embodiment of the short-distance geometric obstacle avoidance method for the fixed-wing unmanned aerial vehicle of the present invention,
[0025] 1. Obstacle positioning
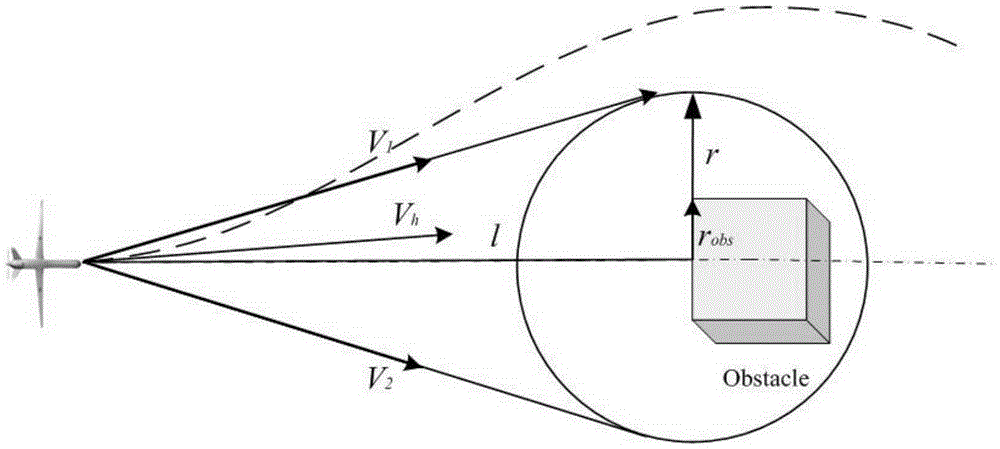
[0026] For short-distance obstacle avoidance, higher precision is required for obstacle detection. This test uses the UTM-30LX laser radar of Japan HOKUYO company. The laser radar has a range of 30 meters, a horizontal viewing angle of 270°, an angular resolution of 0.25°, and an accuracy of 3cm, which can meet the requirements of this method. The lidar is installed at the nose of the drone. In this method, the laser radar is used to detect surrounding obstacles, and the position of the obstacle is calculated through the relative position of the UAV and the obstacle and the current position of the UAV. At the same time, the size of the obstacle can be obtained.
[0027] 2. Set the safe area
[0028] Since the small fixed-wing UAV may be affected by the external environment during fligh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More