

Unmanned aerial vehicle (UAV) work scheduling method and device
A technology for job scheduling and drones, applied in the field of drones, can solve problems such as reducing the efficiency of drone operations, and achieve the effect of improving operational efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
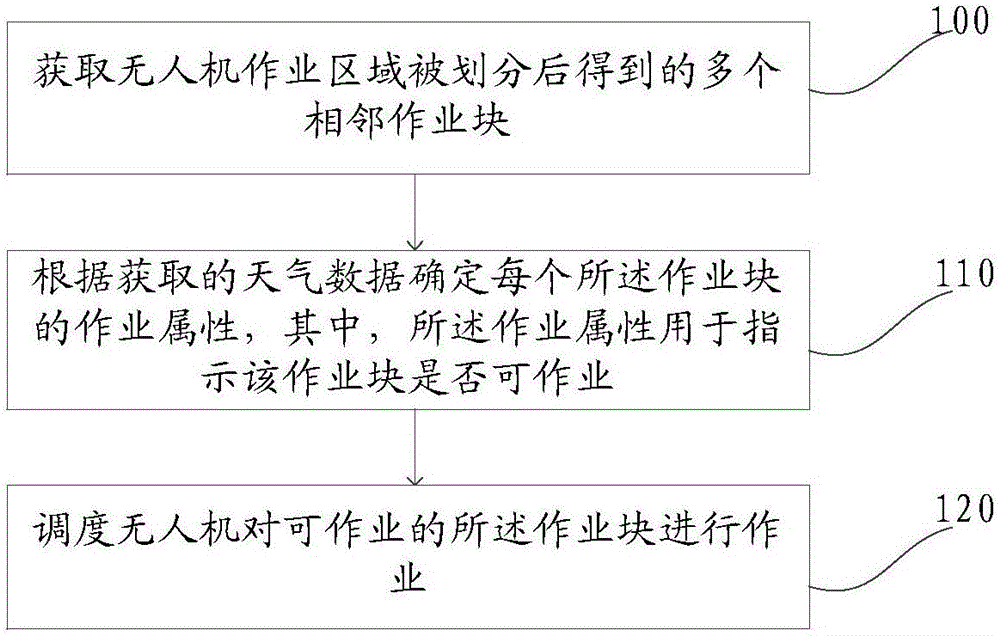
[0024] like figure 1 As shown, the embodiment of the present invention discloses a UAV operation scheduling method, including: step 100 to step 120 .
[0025] Step 100, obtaining a plurality of adjacent operation blocks obtained after the UAV operation area is divided.
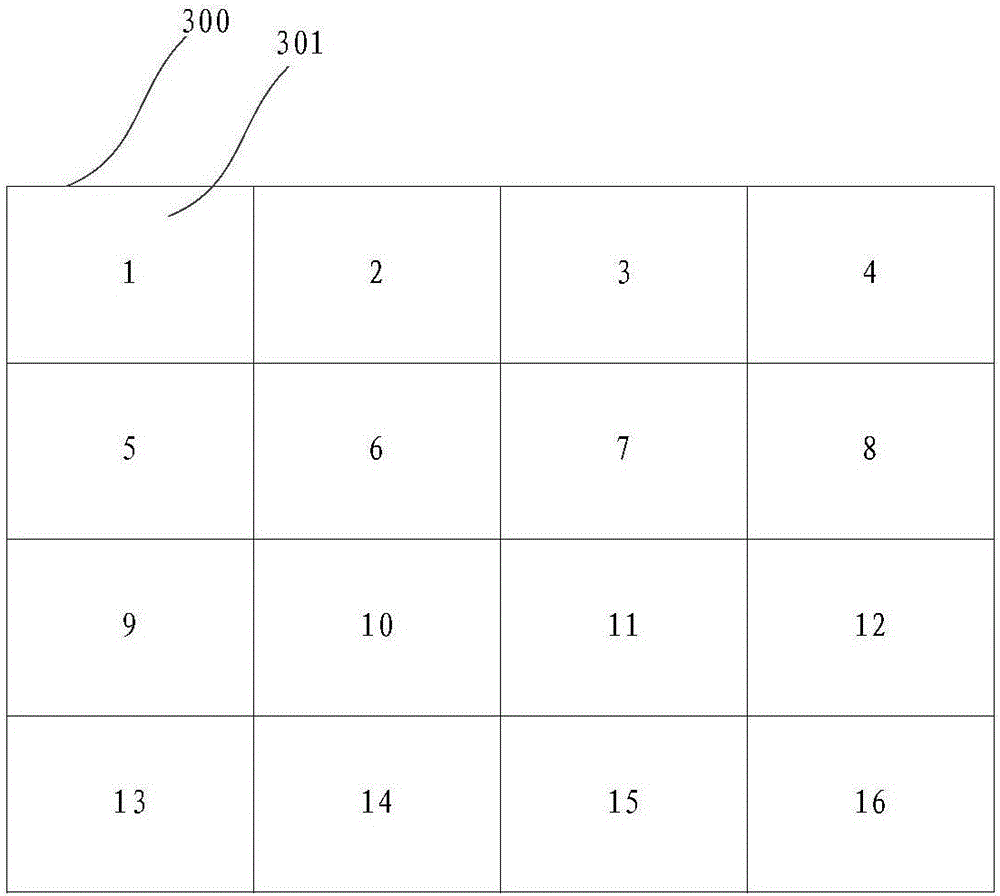
[0026] Before carrying out large-scale operations, the UAV dispatching system usually divides the operation area into thousands of regular rectangular or square operation blocks, so as to facilitate the scheduling of UAVs to perform operations. When specifically dividing, the work area can be divided into multiple adjacent work blocks in sequence from left to right and from top to bottom. Usually the size of each operation block is determined according to the operational area of a single flight of the drone.
[0027] Step 110, determine the operation attribute of each operation block according to the acquired weather data, wherein the operation attribute is used to indicate whether the operation block is o...
Embodiment 2
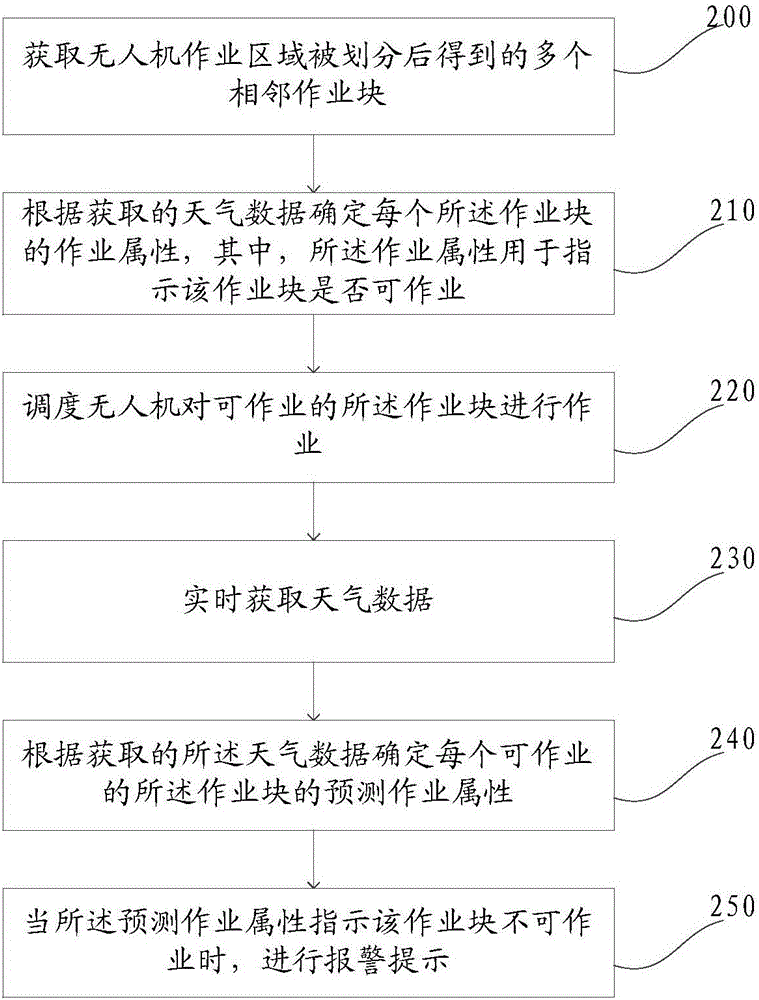
[0034] like figure 2 As shown, the embodiment of the present invention discloses a UAV operation scheduling method, including: step 200 to step 250 .
[0035] Step 200, obtaining a plurality of adjacent operation blocks obtained after the UAV operation area is divided.
[0036] Before carrying out large-scale operations, the UAV dispatching system usually divides the operation area into thousands of regular rectangular or square operation blocks, so as to facilitate the scheduling of UAVs to perform operations. When specifically dividing, the work area can be divided into multiple adjacent work blocks in sequence from left to right and from top to bottom. Usually the size of each operation block is determined according to the operational area of a single flight of the drone.
[0037] Step 210, determine the operation attribute of each operation block according to the acquired weather data, wherein the operation attribute is used to indicate whether the operation block is ...
Embodiment 3
[0057] like Figure 5 As shown, the embodiment of the present invention discloses a UAV operation scheduling device, including:
[0058] The job block acquisition module 500 is used to obtain a plurality of adjacent job blocks obtained after the unmanned aerial vehicle operation area is divided;
[0059] A job attribute determination module 510, configured to determine the job attribute of each job block acquired by the job block acquisition module 500 according to the acquired weather data, wherein the job attribute is used to indicate whether the job block is operable;
[0060] The scheduling module 520 is configured to schedule the unmanned aerial vehicle to perform operations on the operational blocks.
[0061] For the specific implementation of each module, refer to Embodiment 1 and Embodiment 2, which will not be repeated here.
[0062] The UAV operation scheduling device disclosed in the embodiment of the present invention obtains a plurality of adjacent operation blo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More