

A multiple-mobile-robot-cooperated navigation method and system
A mobile robot and collaborative navigation technology, applied in the field of robot navigation, can solve the problems of short measurement period, low precision and low efficiency, and achieve the effect of improving navigation accuracy and navigation efficiency, and being easy to popularize and popularize.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The following description and drawings illustrate specific embodiments of the invention sufficiently to enable those skilled in the art to practice them. Other embodiments may incorporate structural, logical, electrical, process, and other changes. The examples merely represent possible variations. Individual components and functions are optional unless explicitly required, and the order of operations may vary. Portions and features of some embodiments may be included in or substituted for those of other embodiments. The scope of embodiments of the present invention includes the full scope of the claims, and all available equivalents of the claims.
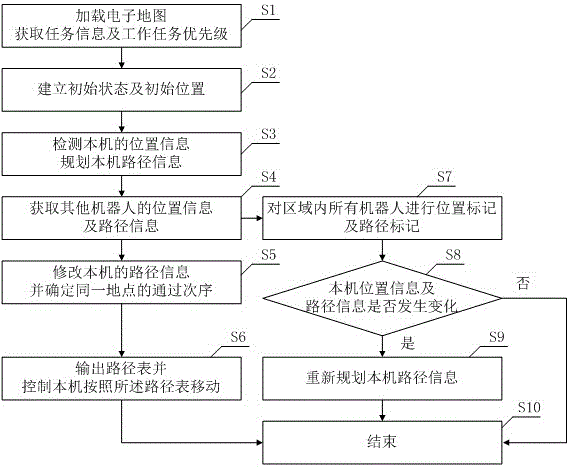
[0042] In some illustrative examples, such as figure 1 As shown, a multi-mobile robot cooperative navigation method is provided, including the following steps:
[0043] Step S1: After the machine is powered on, first initialize the hardware of the Zigbee wireless network communication module, serial port, obstacle recog...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More