

Mobile climbing type image acquisition detection robot
A robot and camera technology, applied in the field of robots, can solve the problems that robots do not have monitoring and cannot achieve fast travel, etc., achieve the effect of rationalizing the selection of travel and climbing routes, improving search and rescue capabilities and efficiency, and increasing the opening and closing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
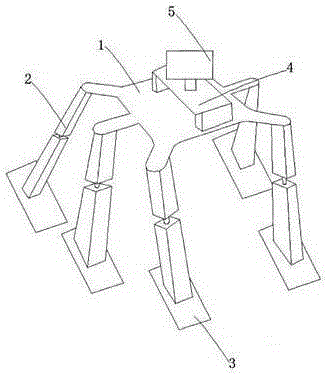
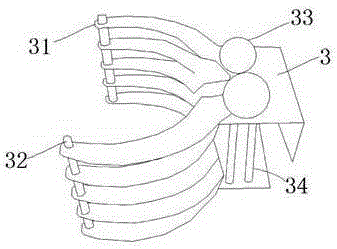
[0014] like figure 1 , figure 2 As shown, the present invention provides a technical solution: a mobile climbing type imaging detection robot, comprising a load-bearing chassis 1, a mechanical arm 2 and a general controller 7, the upper surface of the load-bearing chassis 1 is provided with a support base 4, and the support base 4 The top is provided with a camera 5, and the load-bearing chassis 1 is surrounded by a mechanical arm support frame. In the middle of the side, mechanical arms 2 are fixedly installed at the end of the mechanical arm support frame. The number of mechanical arms 2 is six, which are respectively installed on the corresponding mechanical arm support frames. Two degrees of freedom, the maximum rotation angle is 270 degrees, the two mechanical arms 2 in the middle are support type mechanical arms, with eight degrees of freedom, the maximum rotation angle is 180 degrees, the mechanical claw 3 is installed at the end of the mechanical arm 2, the mechanica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More