

Inertial motion capture attitude instantaneous calibration method and system
A technology of inertial motion and calibration methods, applied in the field of motion capture, can solve problems such as unfavorable application and promotion of motion capture technology, inconvenient use of motion capture systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Below in conjunction with accompanying drawing, further describe the present invention through embodiment, but do not limit the scope of the present invention in any way.
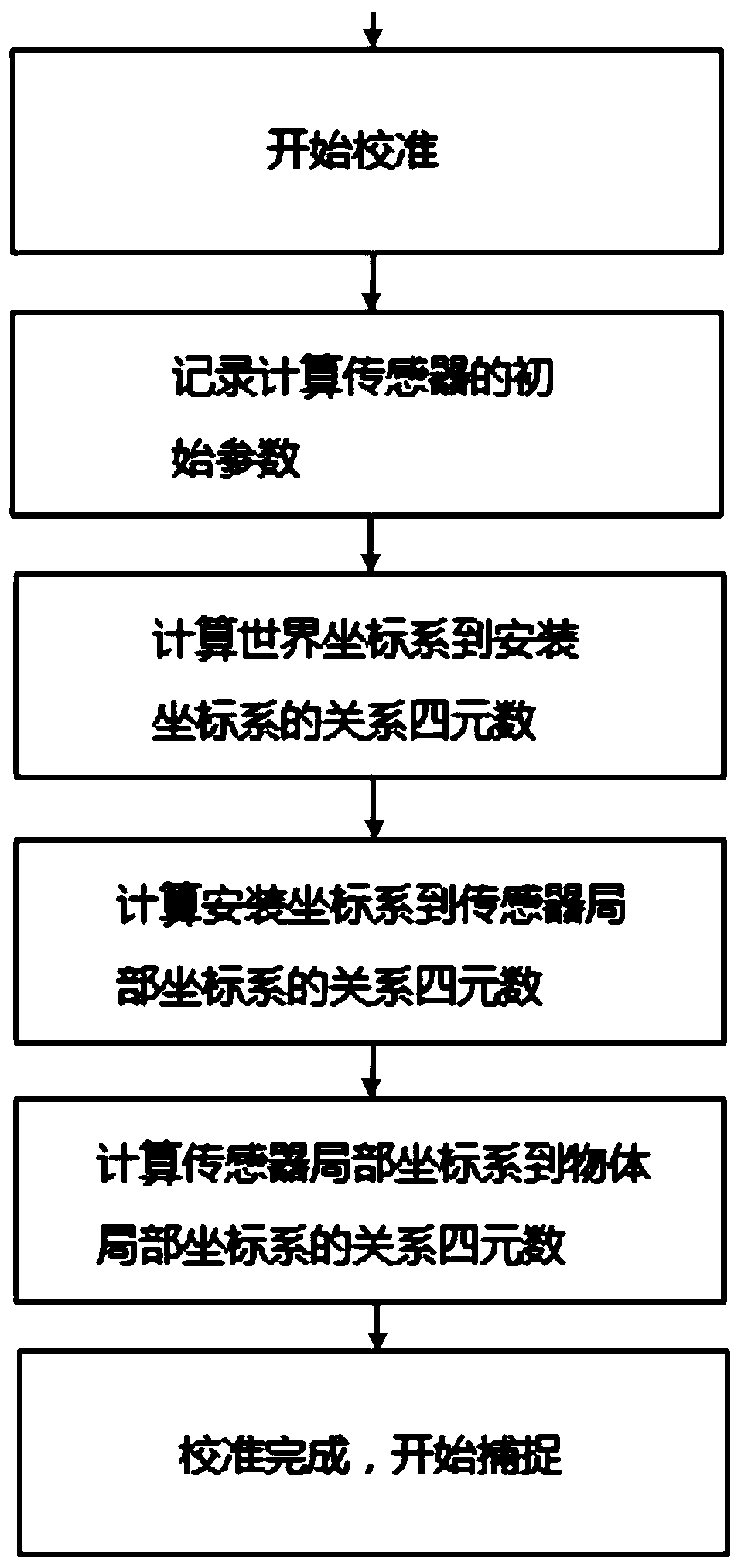
[0054] The present invention provides a method for instantaneous calibration of attitude captured by inertial motion. The attitude calibration is performed by establishing the relationship among the world coordinate system V(w), the captured object coordinate system and the installation coordinate system in the motion capture system. Using the technical solution of the present invention, the user does not need to pose in multiple different postures, and only needs to adopt one posture to quickly complete the system calibration in an instant. The operation is simple and convenient, so the calibration error can be reduced, and the capture action is also greatly saved time. The present invention further proposes a model registration method, which is used to improve the consistency of posture matching, i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More