

Bi-directional gear transmission artificial hand
A two-way gear and prosthetic hand technology, applied in prosthesis, medical science, artificial arm and other directions, can solve the problems of low stability, heavy weight and weak function of the bionic hand, and achieve compact and simplified structure, high transmission efficiency, weight reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
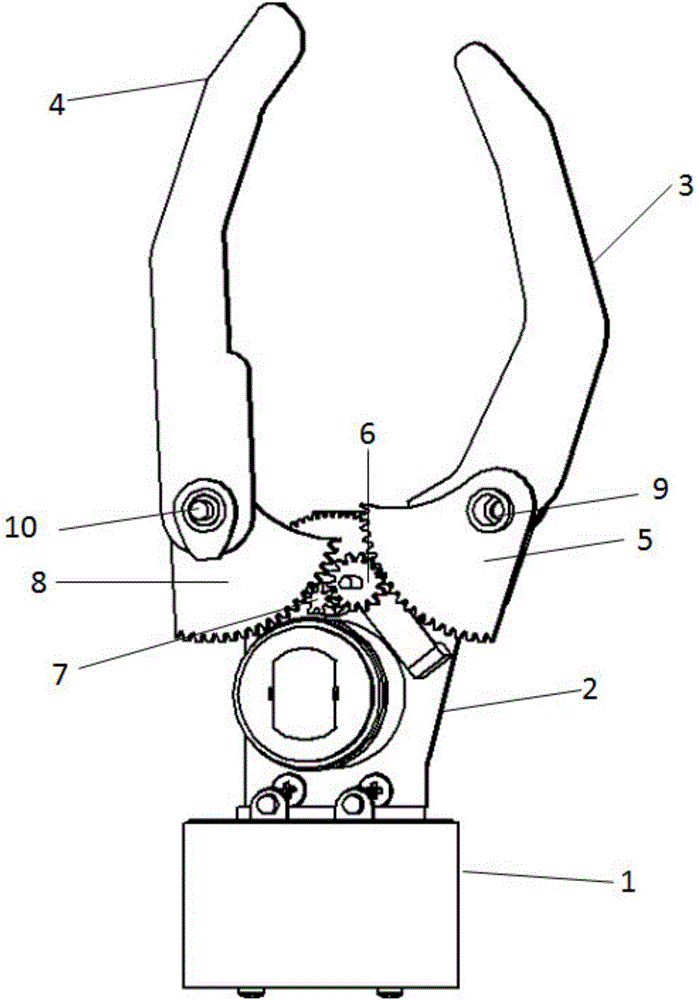
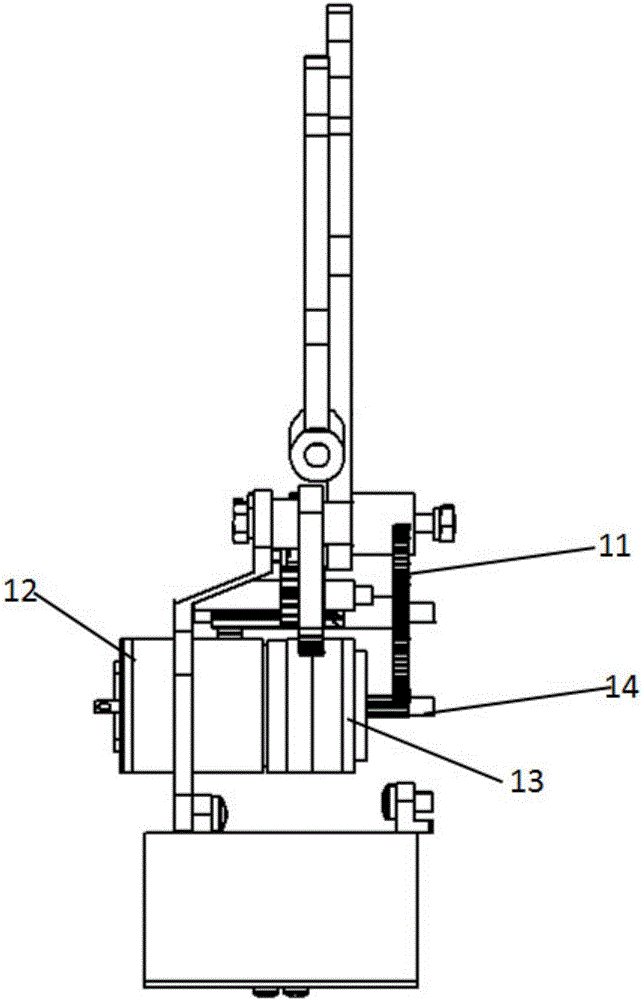
[0025] see figure 1 and figure 2 As shown, the present invention provides a two-way gear transmission prosthetic hand, including a body, the body includes a fixed part and a movable part, the fixed part includes a connecting end 1 for wearing and a palm end 2 for installing driving parts, and the movable part includes two groups The first group of artificial fingers 4 and the second group of artificial fingers 3 arranged symmetrically; the palm end 2 is vertically arranged above the connection end 1 through several connection nuts, and different connection ends can be selected according to the user's wearing position (such as matching wrist or elbow), more user-friendly. The bottom of the artificial finger is fixed on the palm end 2 through the rotating shaft 9, 10, and the artificial finger can rotate around the rotating shaft as the center of a circle, and the first arc-shaped gear 8 and the second arc-shaped gear 8 are fixedly connected to the rotating shaft 9, 10 respect...
Embodiment 2
[0028] Such as Figure 6 and Figure 7 As shown, the difference between Embodiment 2 and Embodiment 1 is that: the first group of artificial fingers 4 includes two artificial fingers arranged in parallel, and the two artificial fingers are fixedly connected through the connecting shaft 15 so that the two artificial fingers can perform synchronous rotational movement , the rotation planes of the two artificial fingers of the first group of artificial fingers 4 and the second group of artificial fingers 3 are staggered from each other.
Embodiment 3
[0030] The difference between Embodiment 3 and Embodiment 1 is that: the palm end 2 is provided with a total of four limit devices at the movement limit position corresponding to the meshing state of the arc gear and the gear shaft.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More