

Visual servo line-grasping control method for electric transmission line inspection robot
An inspection robot and visual servo technology, applied in the direction of manipulators, manufacturing tools, etc., to achieve the effect of favorable design, stable and reliable feature deviation, and intuitive data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
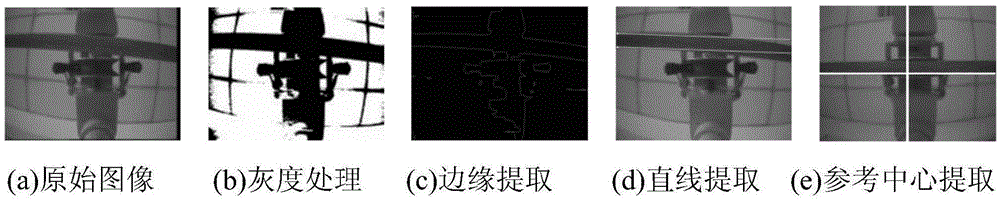
[0043] The present invention collects line images through visual sensors, obtains characteristic deviations through image processing technology, and based on this, combines the kinematics model of the robot and the hand-eye model of the line-grabbing movement to design a visual servo line-grabbing controller to realize transmission line inspection and control. Maintain the autonomous line grasping of the robot. This method overcomes the shortcomings of the existing artificially controlled robots, and improves the automation of transmission line inspection and maintenance robots, such as figure 1 As shown, the specific process is as follows:
[0044] (1) Robot kinematics modeling:
[0045] Establish a joint coordinate system at each joint of the robot, such as figure 2 As shown, obtain the D-H parameters at each joint; use the robot's onlin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More