

Multi-power source decoupling and vector controlling device and method for gasoline-electric hybrid unmanned gyroplane
A technology of unmanned rotor and vector control, which is applied to power plants, motor vehicles, unmanned aircraft, etc. on aircraft, can solve the problems of slow flight speed, stalling, and inability to achieve fast flight, etc., to achieve increased flight speed, The effect of stable flight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
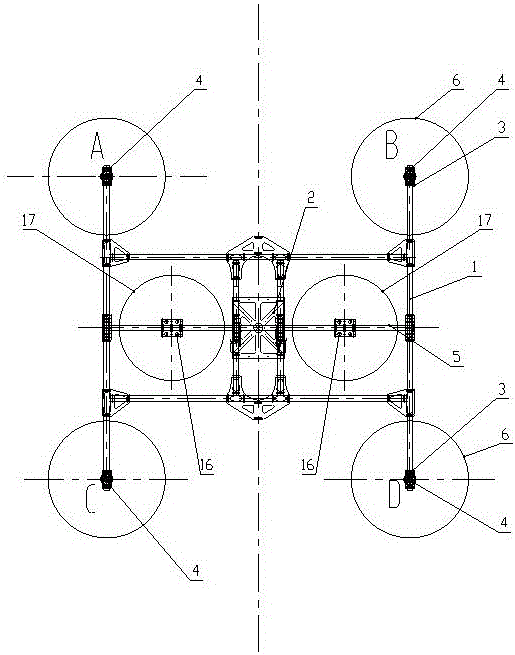
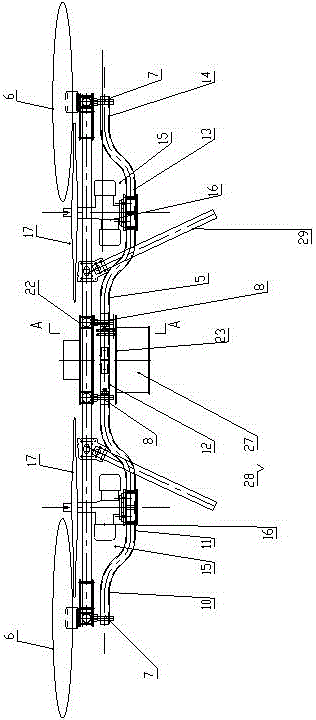
[0040] Such as figure 1 , 2 As shown in . The central platform 2 of the frame at the position, and the UAV frame 1 is provided with an even number of arms 3, figure 1 The embodiment in is a multi-rotor UAV with a four-axis "X" configuration. Four arms 3 are arranged on the frame 1 of the UAV. Each arm 3 is connected to a motor 4, and each motor 4 is connected to There are 6 motor propellers. Also be connected with landing support 29 on the UAV frame 1.
[0041] Four T-motor u11 motors are selected and equipped with 28-inch carbon fiber propellers. If the take-off weight is 47kg, the pulling force generated at 50% throttle is about 22kg.
[0042] The rotor drone of the present invention also includes a gasoline power vector shaft 5, the left and right ends of the gasoline power vector shaft 5 are rotationally connected with the UAV frame 1, and the two ends of the gasoline power vector shaft 5 are connected to the UAV frame 1. An end bearing 7 is provided, and the middle p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More