

Water unmanned ship local hierarchical path planning method based on navigation error constraint
A path planning and error constraint technology, applied in the direction of genetic model, genetic law, data processing application, etc., can solve the problem of not considering the influence of navigation error path planning, not incorporating genetic algorithm, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with embodiment and accompanying drawing.
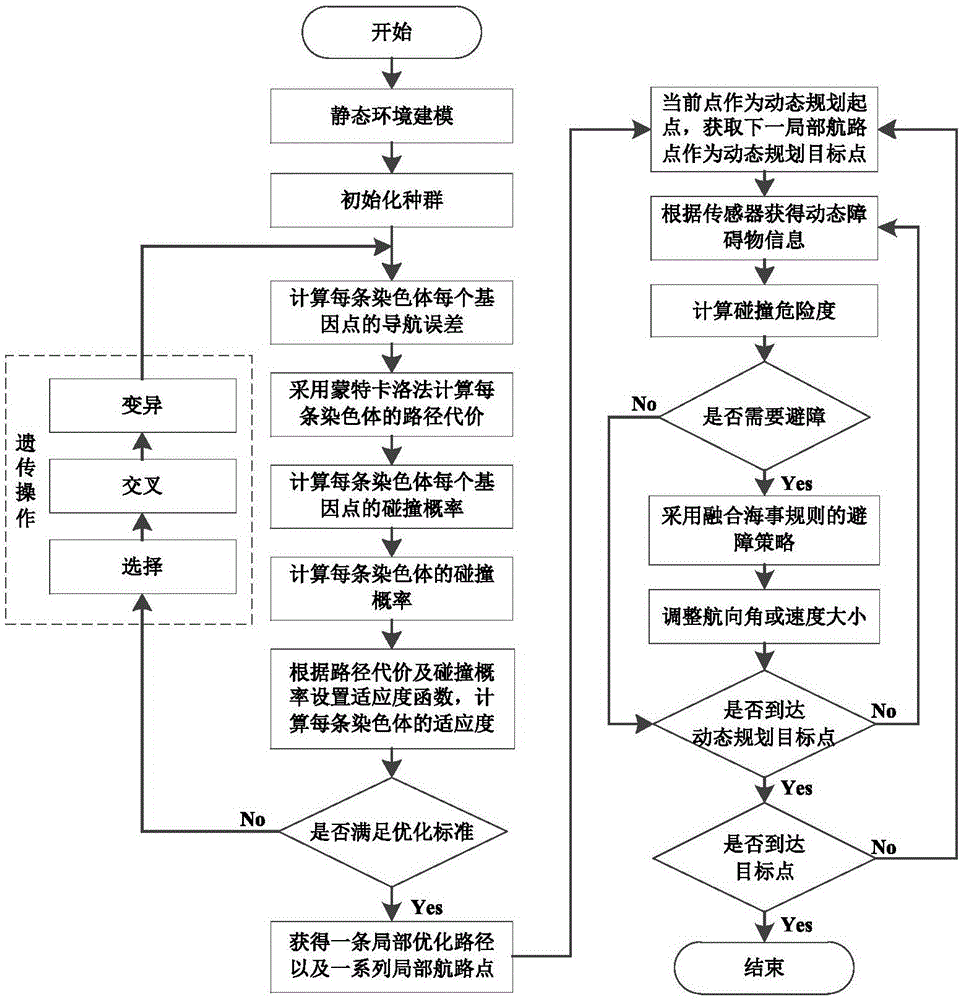
[0073] The local hierarchical path planning method of the surface unmanned boat based on navigation error constraints of the present invention comprises the following steps:
[0074] Step 1) Discretize the environment into two-dimensional basic unit grids by using the Cartesian coordinate system and the grid method according to the static obstacle information obtained by the task, the electronic chart and the sensor, and carry out the environmental analysis by marking these grids. Modeling, initialize the starting point position Start and the target point position Goal; the area with obstacles is marked as 1, which means the obstacle grid, and the area without obstacles is marked as 0, which means the free grid; the Cartesian coordinate system is based on the starting point is the origin, and x, y, and z point to the east, north, and sky of the starting point, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More