

Navigation route finding method, robot and system
A robot and motion technology, applied in the field of robotics, can solve the problems of navigation and pathfinding accuracy that need to be improved, and achieve the effect of avoiding a large amount of calculation and poor accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
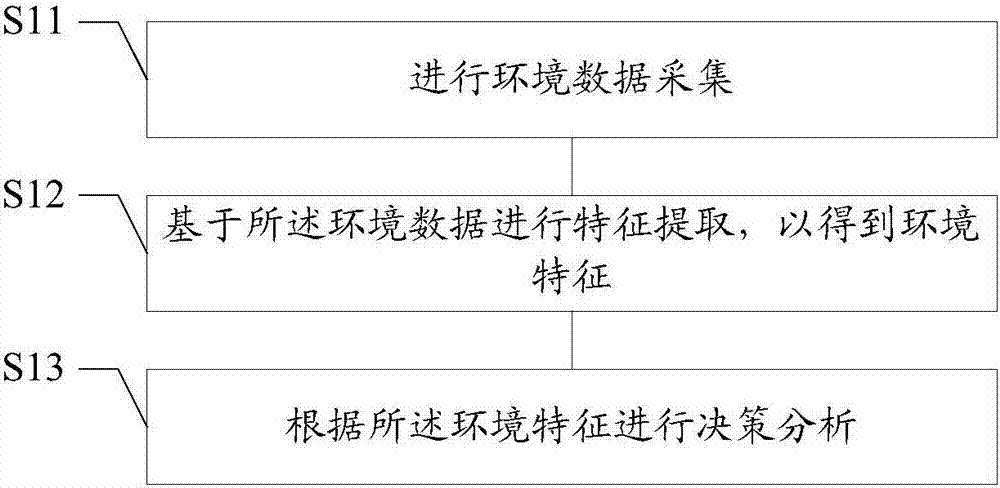
[0066] As mentioned above, the accuracy of existing robot navigation pathfinding needs to be improved. Specifically, the inventors found that the existing robot navigation pathfinding is usually based on figure 1 The following steps are shown for the calculation:
[0067] Step S11, collecting environmental data.
[0068] Step S12, performing feature extraction based on the environmental data to obtain environmental features;
[0069] Step S13, performing decision analysis according to the environmental characteristics, so as to perform navigation and wayfinding.
[0070] In the prior art, since features need to be extracted based on environmental data, and decision analysis is performed based on the extracted environmental features, data loss will inevitably be caused during the process of feature extraction, so the accuracy of navigation is poor.
[0071] In addition, because the application environment of the navigation pathfinding method is usually relatively complex, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More