Unmanned aerial vehicle positioning method based on computer vision
A technology of computer vision and positioning method, applied in the field of unmanned aerial vehicles, can solve the problems of lack of inspection operation ability, low safety of unmanned aerial vehicle line inspection, and inability to achieve precise positioning, so as to reduce the complexity of manual manipulation, The effect of improving the level of operation intelligence and reducing the risk of serious consequences
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
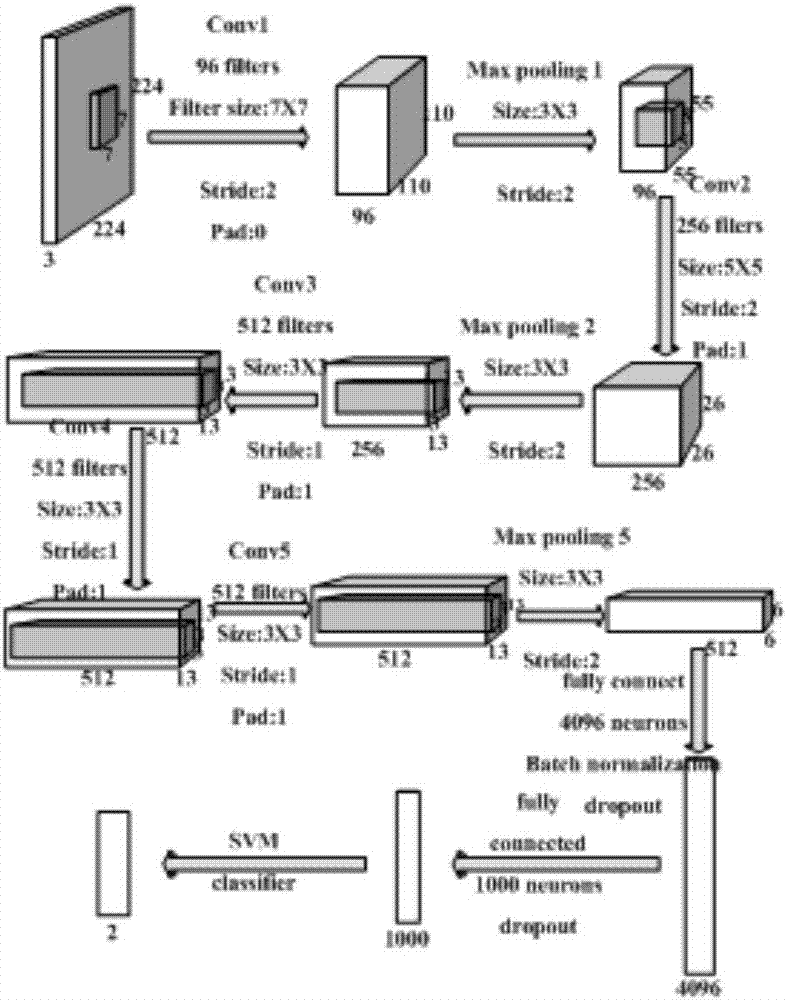
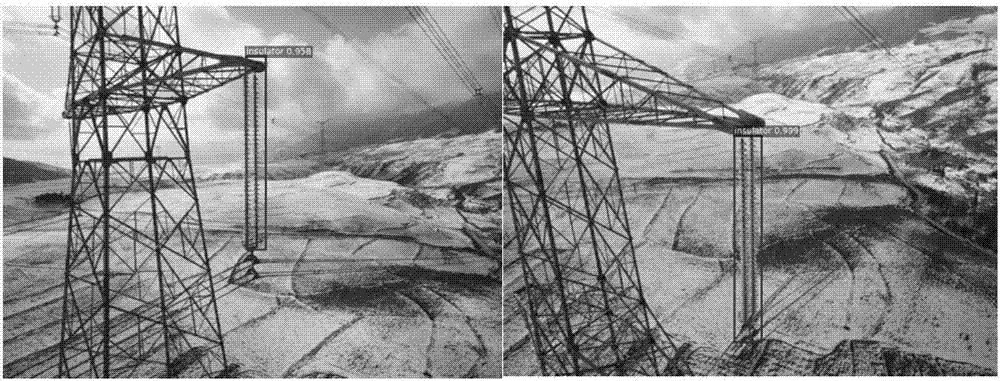
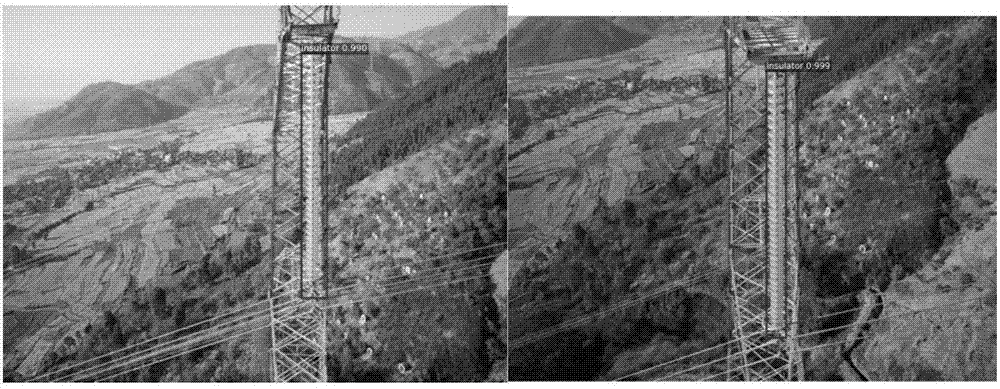
[0057] Using drones, samples were collected from insulators on different transmission lines in different seasons. The training samples are 4000 aerial images of insulators, including 2000 images of glass insulators and 2000 images of porcelain insulators. A convolutional neural network is used to train the disc-shaped suspension porcelain and disc-shaped suspension glass insulators to be detected. In order to reduce the workload of labeling, each selected training sample only contains a pair of insulator strings, showing horizontal, vertical and angular distributions respectively.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com