

A static calibration method for robot hand and eye
A technology of static calibration and robotic hand, which is applied in the direction of instruments, image analysis, calculation, etc., can solve the problems of self-calibration method, such as weak robustness, complicated calculation process, and low precision, so as to avoid the reduction of calibration accuracy, simple calculation, and high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
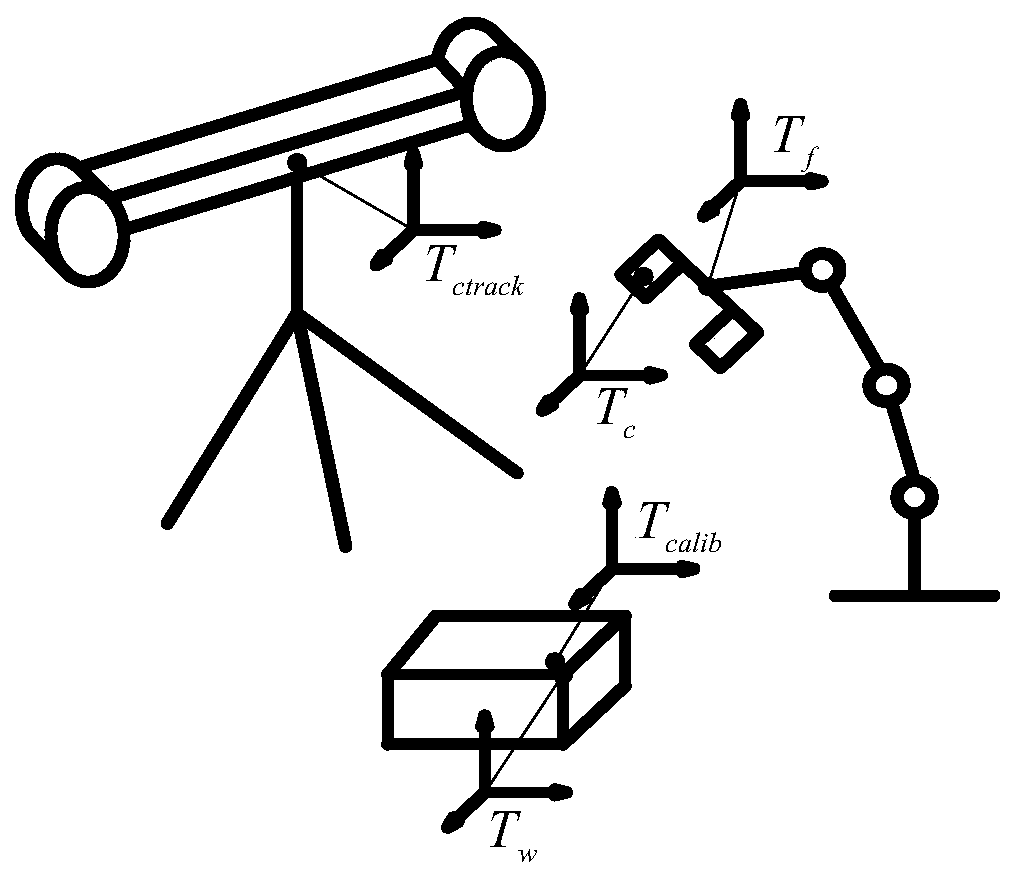
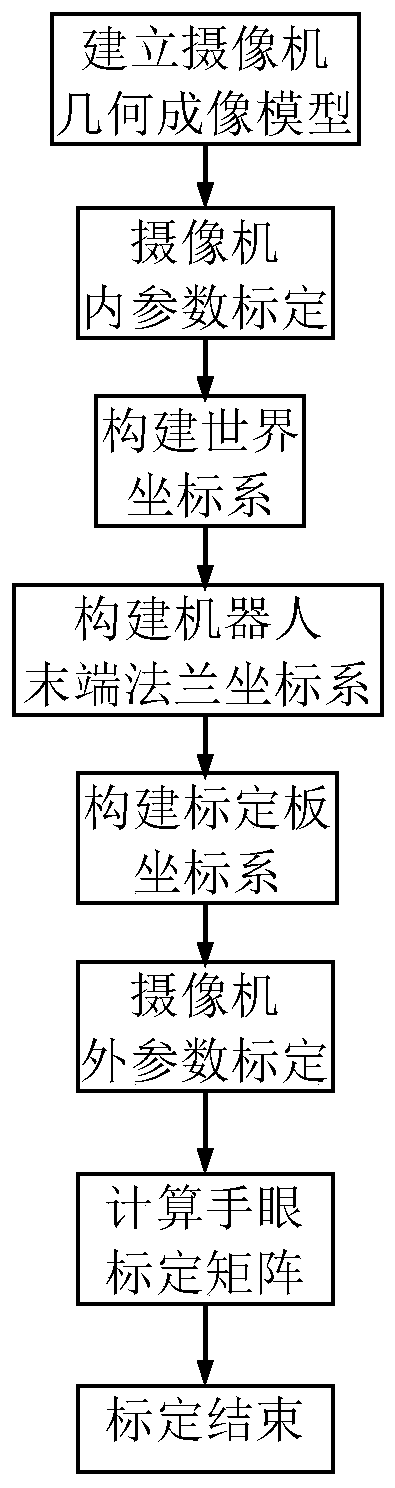
[0027] See attached Figure 1~3 , the robot hand-eye static calibration method of the present invention comprises the following steps:
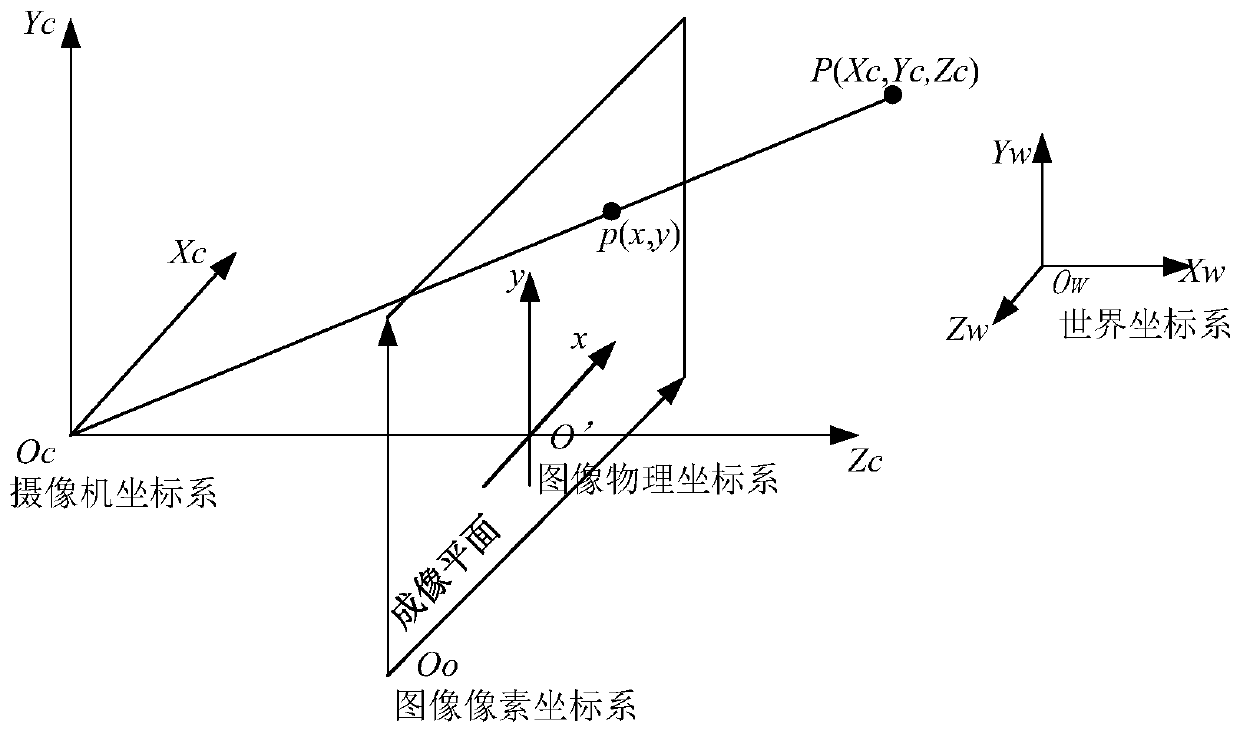
[0028] (1) Establish camera geometric imaging model
[0029] The geometric imaging model of the camera is established with the classic pinhole model. Let [x w the y w z w 1] T is the reference point coordinates of a given object in the world coordinate system; [u v] T is the coordinate of the point in the image coordinate system; k is the scale factor; f u , f v are the scale factors of u-axis and v-axis on the imaging plane, respectively; [u 0 v 0 ] T is the principal point coordinates; s is the tilt factor, here s ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More