

2SPS+RRPRR robot grabbing mechanism used for plate splicing
A grasping mechanism and robot technology, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large retraction envelope and small space for dexterous operation, so as to reduce the envelope, expand the work space, and enhance the control of the mechanism. and surveillance capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to better illustrate the present invention, the present invention will be described in detail with a preferred embodiment and with accompanying drawings, specifically as follows:
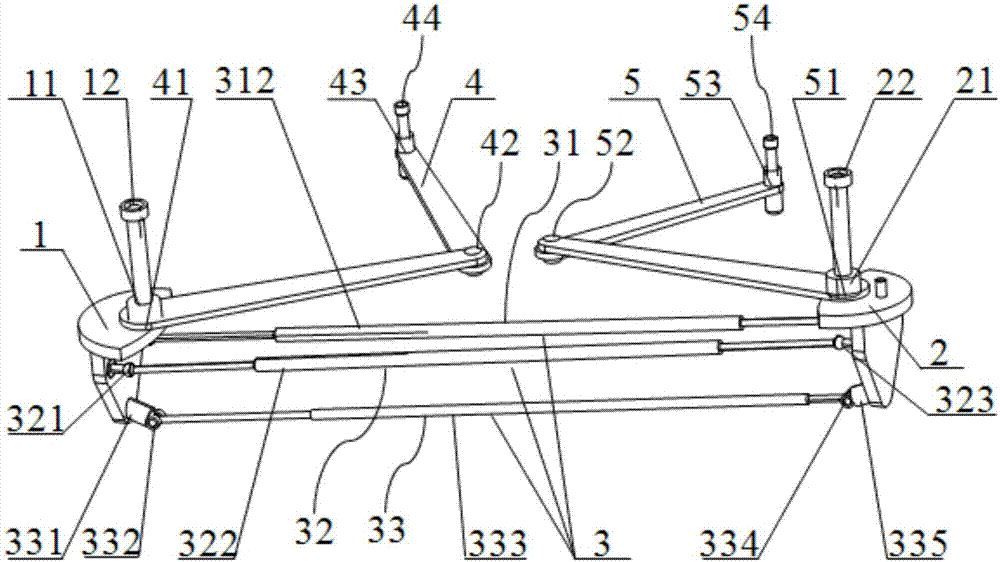
[0020] The 2SPS+RRPRR robot grabbing mechanism for plate splicing provided in this embodiment is mainly used in the task requirements of splicing a large number of plate units into large-area-long-span planes, paraboloids or other target curved surfaces in ground or space tasks. Adapting to this large-area-long-span splicing requires a specific structural setting of the grasping mechanism to expand the motion envelope of the mechanism.
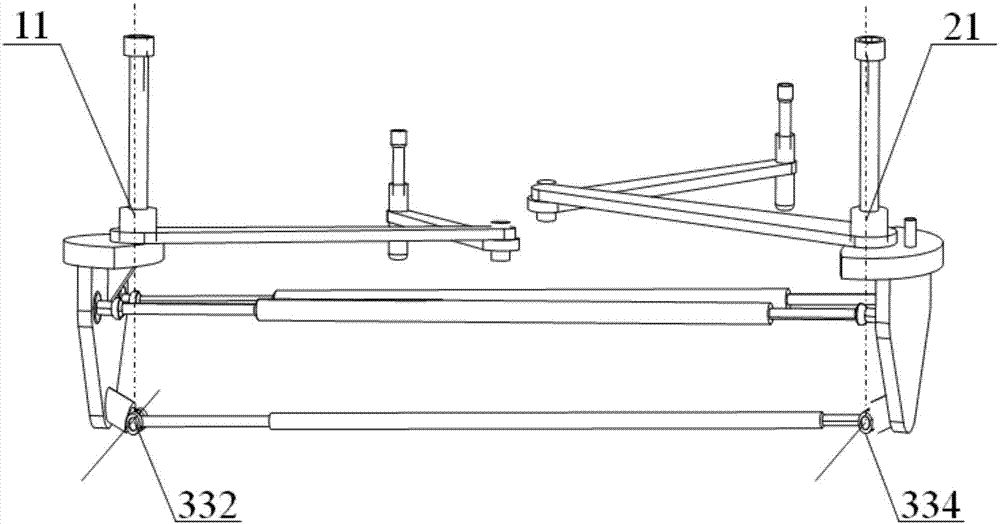
[0021] Such as figure 1 As shown, the grabbing mechanism includes an upper platform 1, a lower platform 2, and three branch chains 3 connecting the upper platform 1 and the lower platform 2. Among them, the upper platform 1 and the lower platform 2 are connected by three branch chains 3 in the form of 2SPS+RRPRR. Specifically, the three branches in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More