Method to determine an evasion trajectory for a vehicle
A technology of track and vehicle, applied in the field of evasive track for finding vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
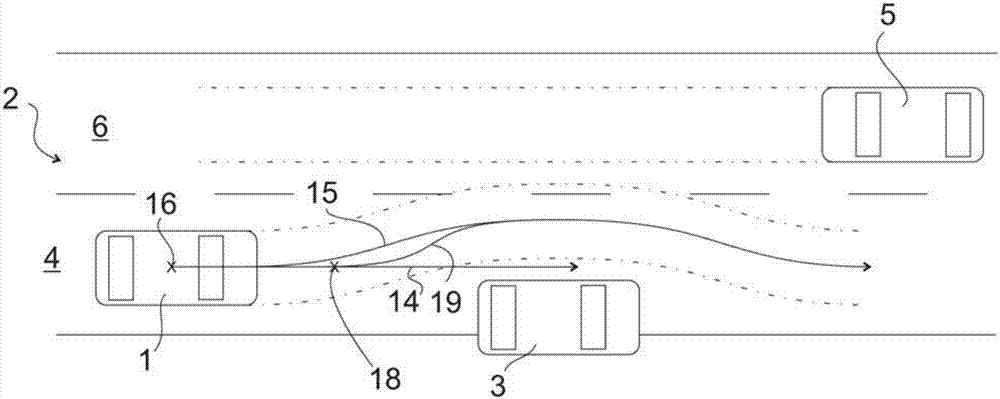
[0037] figure 1 A motor vehicle 1 is shown, which is equipped with a driver assistance system according to the invention and is driving on a road 2, here a two-lane road. The vehicle parked on the side of the road blocks a part of the lane 4 of the road surface 2 on which the vehicle 1 is traveling, and therefore becomes an obstacle 3 that the vehicle 1 must bypass to avoid collision.
[0038] Another vehicle 5 is driving on the opposite lane 6 of the road surface 2. When the motor vehicle 1 detours in a direction relative to the vehicle 6 in order to bypass the obstacle 3, it is not allowed to cause a collision with the vehicle 5 as a result.
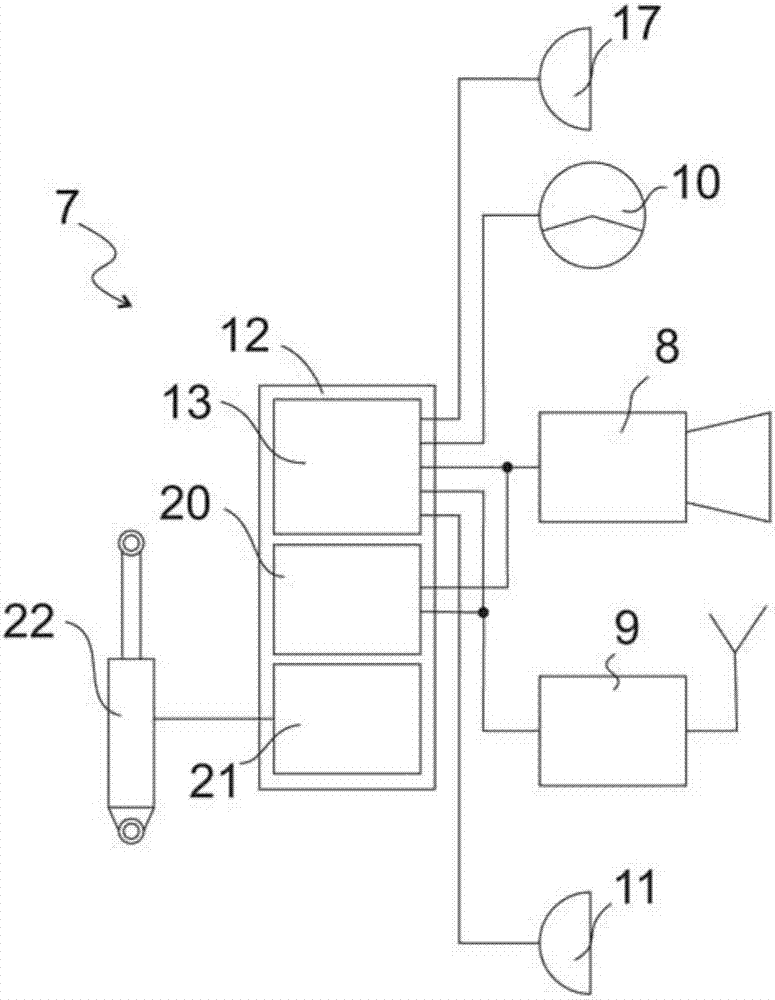
[0039] figure 2 A block diagram of the driver assistance system 7 is shown, and the motor vehicle 1 is equipped with the driver assistance system 7. Speedometer 17 and environmental sensor 8. Here the camera belongs to the driver assistance system 7. The camera is aimed at the road surface 2 in front of the motor vehicle 1. It is not only...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com