

Unmanned aerial vehicle attitude fuzzy adaptive predication control method based on nonlinear model and system thereof
A fuzzy self-adaptive, non-linear model technology, applied in the direction of adaptive control, attitude control, general control system, etc., can solve problems such as difficult to find
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
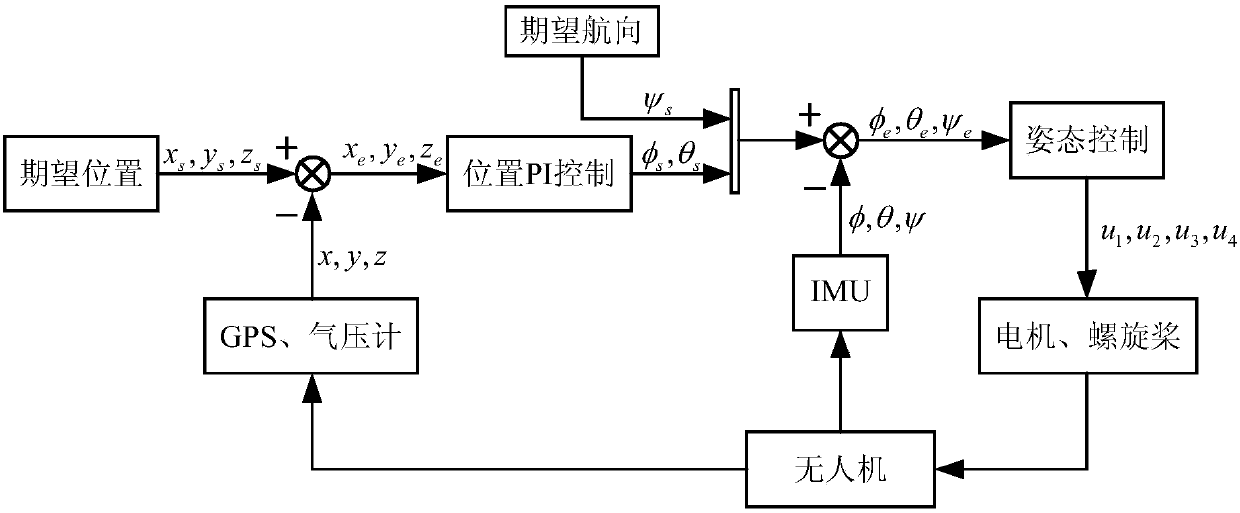
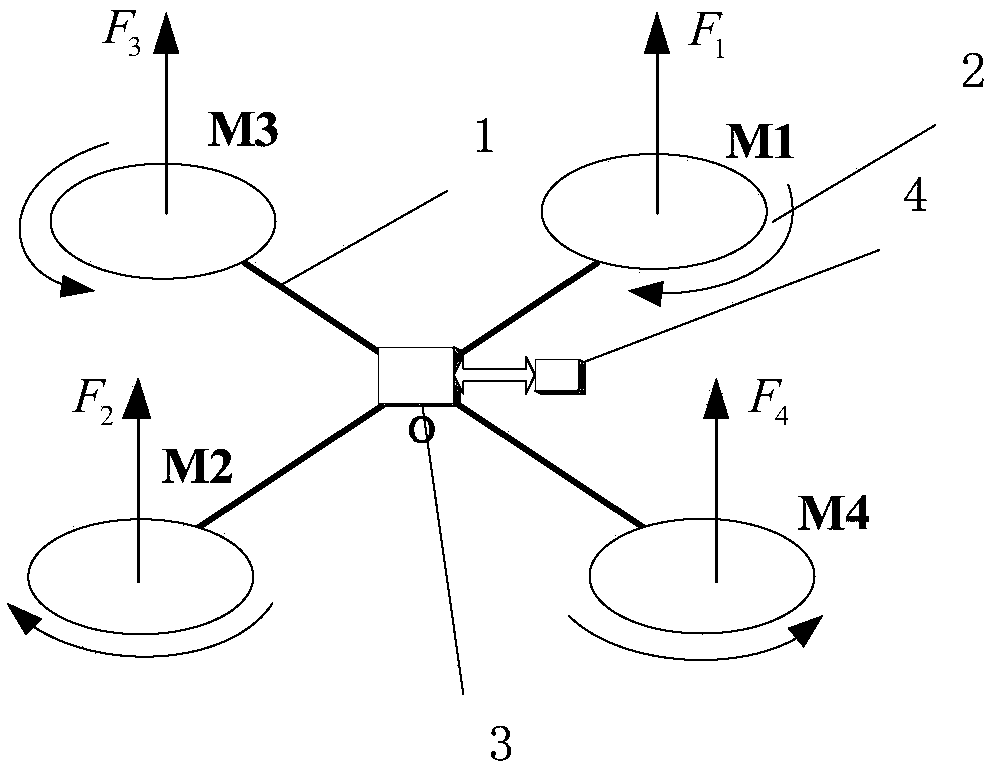
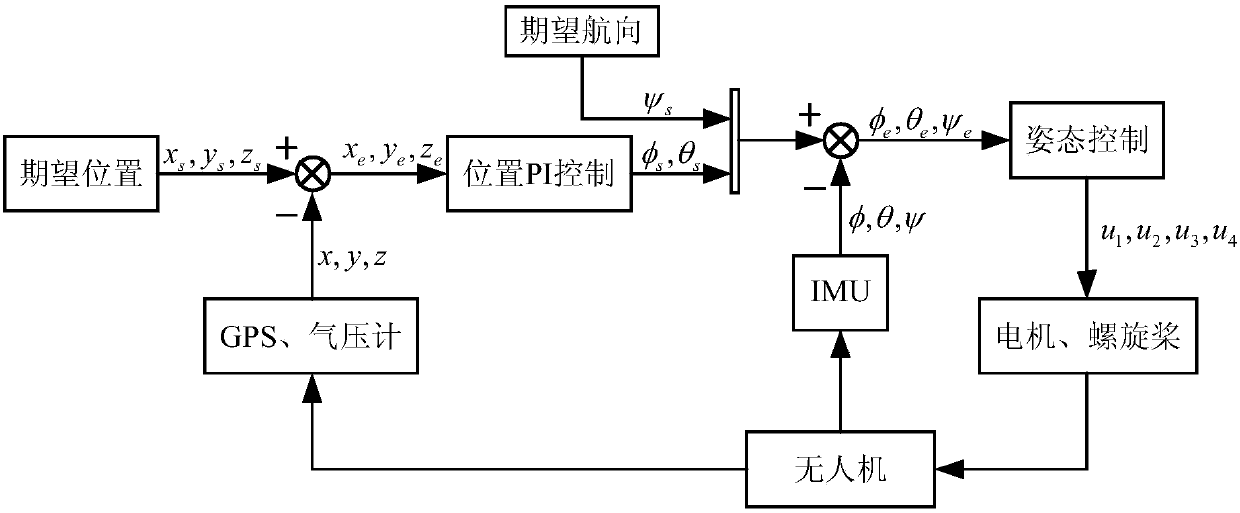
[0055] The structure of the controlled object of the present invention-the four-rotor unmanned aerial vehicle control system with fuzzy adaptive predictive controller is as follows: figure 2 As shown, among them: 1 is the airframe, 2 is the power device, which is mainly composed of electronic governor, brushless motor and propeller, 3 is the main control board of the flight control system, 4 is the cooperative fuzzy adaptive predictive control algorithm loaded The processor module communicates with the main control board main control board 3 through a serial port in full duplex. The working process of the four-rotor UAV control system with fuzzy adaptive predictive controller used in the present invention is as follows: firstly, the UAV system issues commands to the UAV under the monitoring of the remote control or the ground station, that is, controls the UAV. The machine performs forward, backward, left, right, yaw and other movements. The main control board 3 obtains the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More