

A method for locating an instrument to be identified by a power inspection robot
A power inspection and positioning method technology, applied in the field of image processing, can solve the problems of large image jitter, result uncertainty, time consumption, etc., achieve strong anti-interference ability, strong robustness, and reduce alignment errors Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0041] The technical scheme that the present invention solves the problems of the technologies described above is:
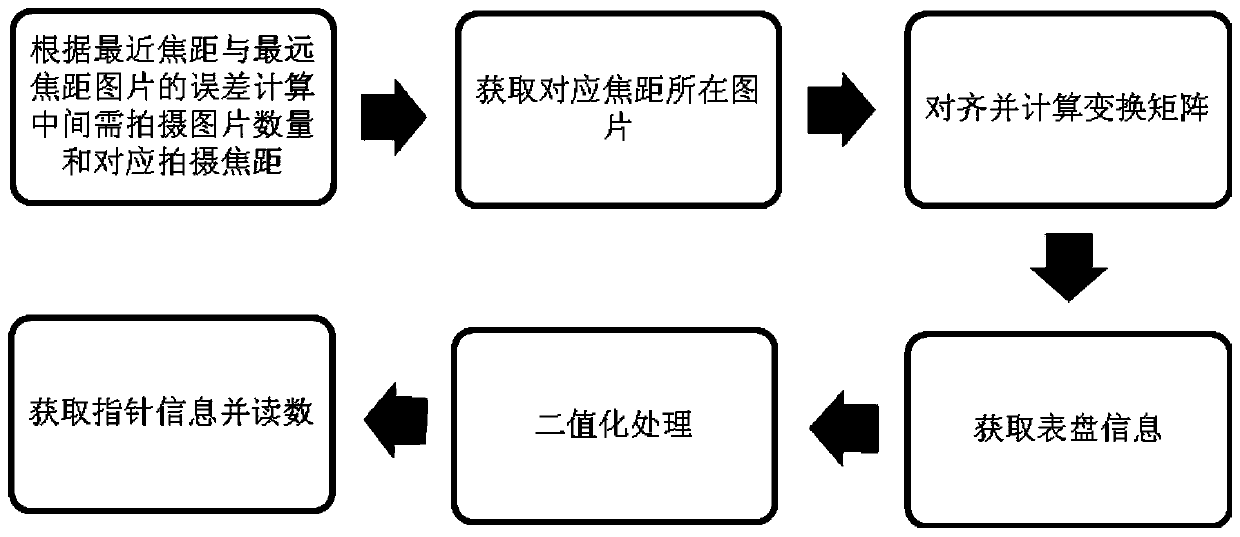
[0042] refer to figure 1 Described is a method for locating an instrument to be identified by a power inspection robot, comprising the following steps: (1) calculating the number of pictures to be taken in the middle and the corresponding shooting focal length according to the error of the pictures with the closest focal length and the farthest focal length (2) obtaining the location of the corresponding focal length Figure (3) Align and calculate the transformation matrix (4) Obtain dial information (5) Binarization process (6) Obtain pointer information and read.
[0043] Experiment with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More