

Multi-sensor TDOA passive positioning method based on GLMB filtering
A passive positioning, multi-sensor technology, applied in positioning, instruments, radio wave measurement systems, etc., can solve problems such as lack of prior knowledge of the tracking environment, inability to determine the number of targets, and inability to determine whether the observation data is a real target or a false one.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] The present invention will be further described below in conjunction with accompanying drawing.
[0100] The present invention provides a multi-sensor multi-target joint positioning and tracking method for a static sensor platform, and its specific implementation is as follows:
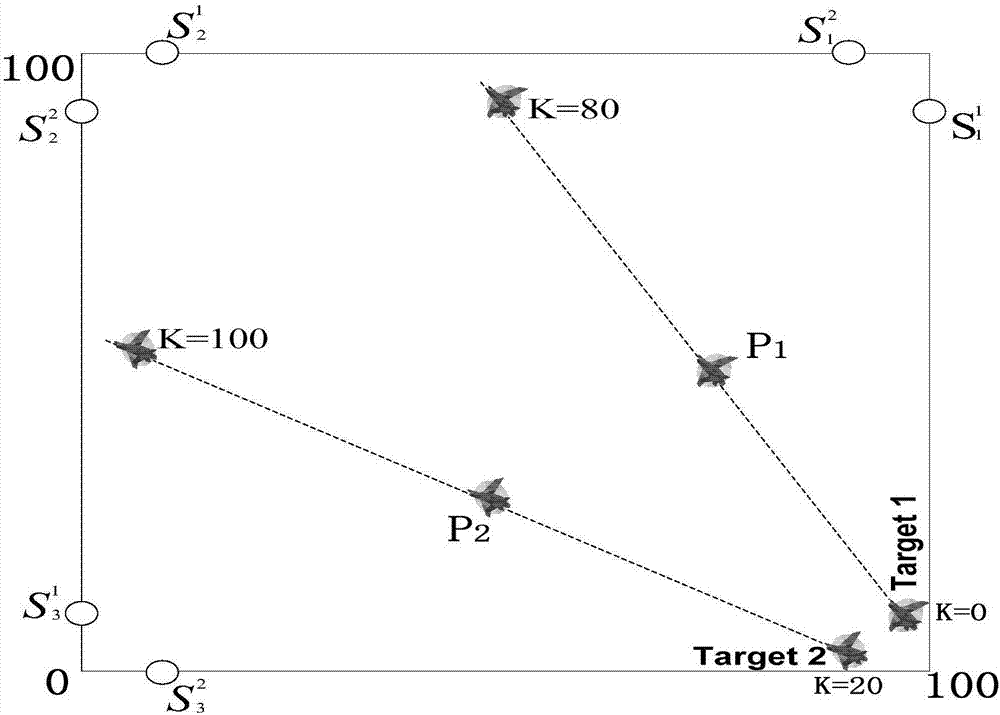
[0101]1) In the two-dimensional plane tracking area of [0,100]×[0,100]㎡, place three pairs of sensors at fixed positions, and perform positioning and tracking on two targets moving in a straight line at a uniform speed in the tracking area. The positions of the three pairs of sensors are respectively : (100m, 95m) and (95m, 100m), (5m, 100m) and (0m, 95m), and (0m, 5m) and (5m, 0m), target 1 appears when k=0s, when k= Disappeared in the tracking area at 80s, the initial state is x 1 =[100m,-1m / s,0m,1m / s] T , the target 2 appears when k=20s, disappears in the tracking area when k=100s, and the initial state is x 2 =[90m, -1m / s, 5m, 1m / s] T ,Such as figure 1 shown.
[0102] 2) Obtain the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More