Topological map building method of mobile robot and navigation method
A mobile robot and topology map technology, applied in the field of mobile robots, can solve the problems of low global positioning accuracy, high maintenance cost and inflexibility of following path guidance, and achieve the effect of improving navigation efficiency and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
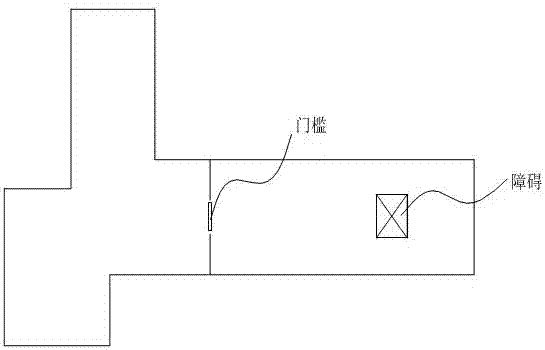
[0032] This embodiment mainly describes the method for creating a topological map of a mobile robot. The mobile robot in this embodiment is described by taking an indoor cleaning robot as an example. The navigation system of the indoor cleaning robot includes a positioning module, a sensor module, a motion module and a control module. The positioning module includes a laser radar, an odometer, a sensor module includes a limit switch, an infrared sensor and an ultrasonic sensor, and the control module includes a driving wheel and a speed measuring module. The mechanism, the positioning module and the sensor module transmit the acquired environmental information to the control module, and the motion module receives and executes the instructions of the control module.
[0033] combine Figure 1 to Figure 6 , the method for creating a topological map of an indoor cleaning robot includes the following steps:
[0034] S1: Construct the current area according to the acquired enviro...
Embodiment 2
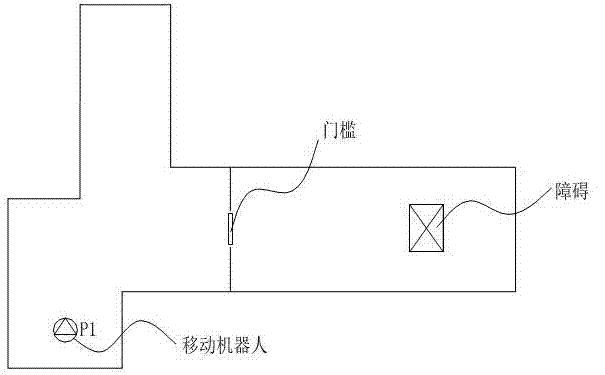
[0051] This embodiment mainly describes the navigation method of the mobile robot.
[0052] Please combine Figure 7 with Figure 8 , the navigation method of the mobile robot of the present invention is based on the topological map created by the method in embodiment 1, specifically comprising the following steps:
[0053] Step 1: Obtain the current position of the mobile robot and the position of the target point.
[0054] The positioning subsystem of the mobile robot (indoor cleaning robot) calculates the odometer information based on the distance information collected in real time by the lidar positioning sensor and the motion control subsystem through the left and right encoders, so as to obtain the current position information of the mobile robot; the mobile robot analyzes the navigation instructions Obtain the location information of the target point.
[0055] Step 2: Determine whether the current position of the mobile robot and the target point are located in the n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More