Behavior-based formation keeping method for unmanned aerial vehicle (UAV) formation
A drone and formation technology, applied in three-dimensional position/channel control and other directions, can solve problems such as delay, information loss, and communication effects, and achieve the effect of rapid prototyping and avoiding the recovery process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
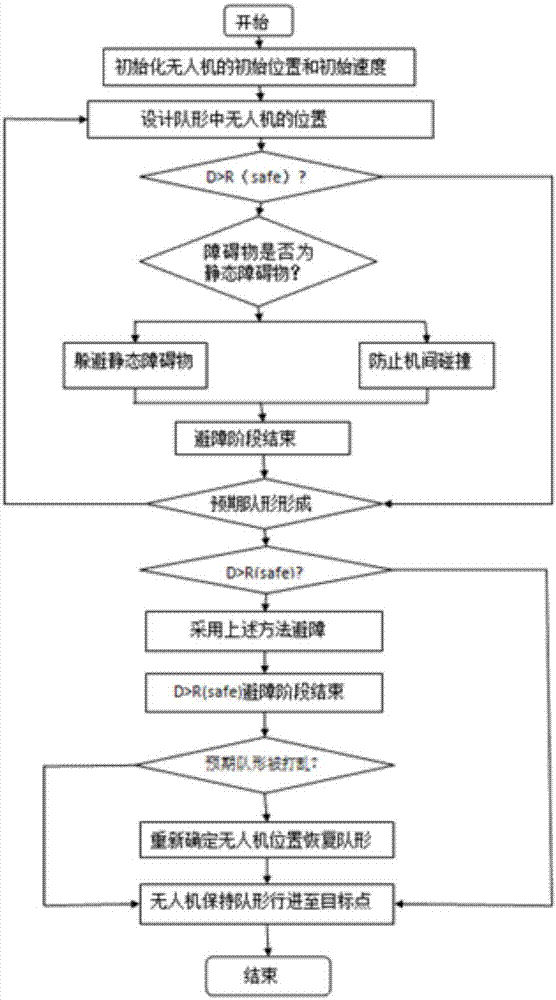
[0027] Such as figure 1 As shown, a kind of behavior-based method of UAV formation formation of the present invention keeps comprising the steps:
[0028] 1) Initialize the position and speed of the drone;
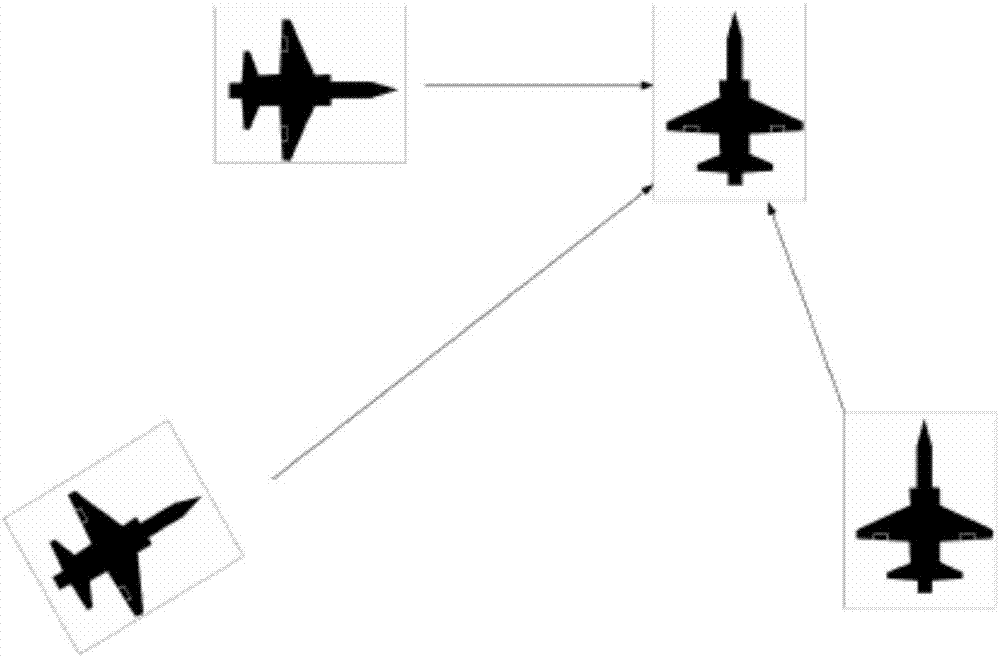
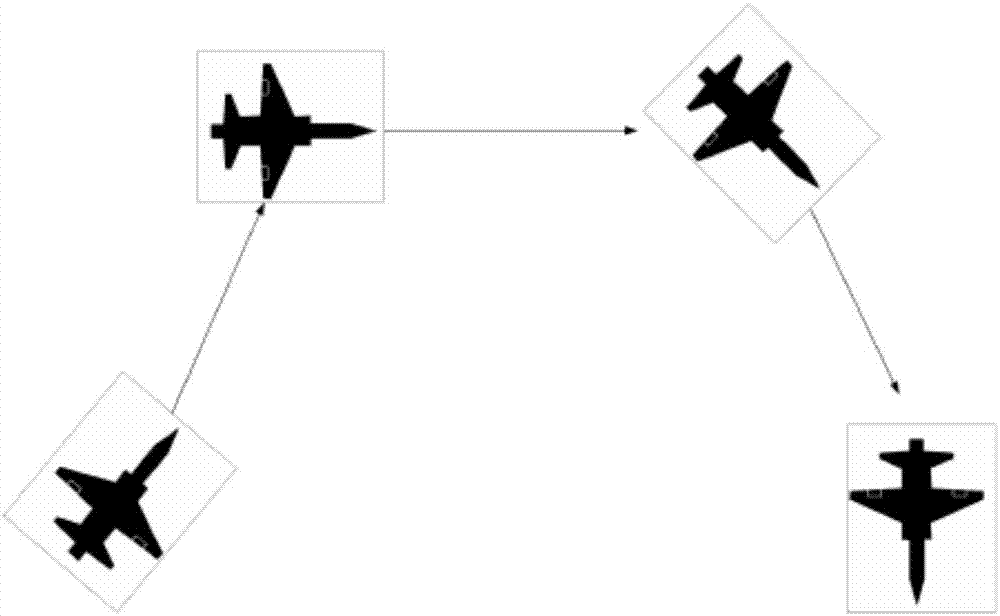
[0029] 2) Design the position of the UAV in the formation, and determine one UAV in the formation as the reference UAV; other UAVs maintain a fixed distance and angle with the reference UAV, and all UAVs get Distance and angle information to other drones in the formation;
[0030] 3) The UAV implements the behavior of rushing to the target according to the expected formation and judges the distance between each UAV and the obstacle in real time; the obstacle refers to the obstacle on the UAV route;
[0031] When the distance between any UAV in the UAV formation and the obstacle is less than the set safety distance, the UAV formation avoids the obstacle and prevents the collision between the UAVs; otherwise, the UAV keeps the formation and advances to the target position ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com