

Material grabbing method and system
A material and material box technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of limited grasping ability, marking and grasping, objects with different shapes, pencils and barrels of oil, etc., to achieve The effect of improving adaptability and improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solutions in the embodiments of the present invention will be described below with reference to the drawings in the embodiments of the present invention.
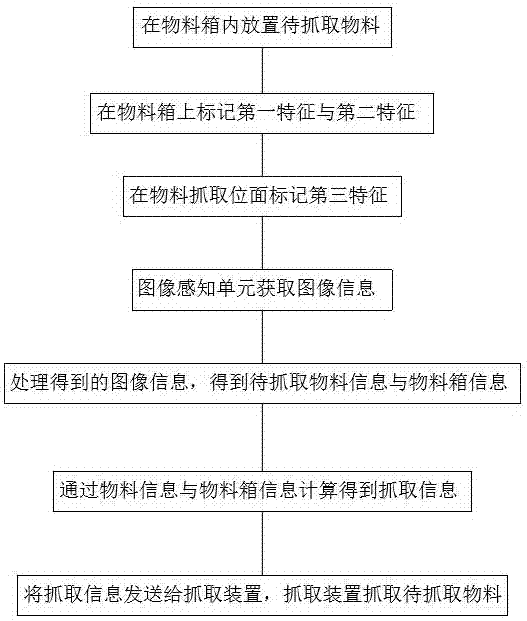
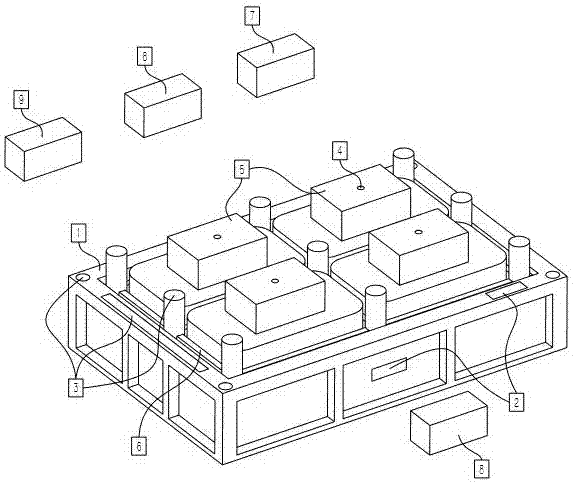
[0035] figure 1 The flow chart of the method for grasping the material to be grasped provided by the embodiment of the present invention is shown. The grabbing method includes a material box 1 , a first feature 2 , a second feature 3 , a third feature 4 , a material to be grabbed 5 , a material limit block 6 , a grabbing device 7 , a camera 8 , and a processing memory 9 .
[0036] Place at least one material 5 to be grabbed in the material box; mark the first feature 2 and the second feature 3 on the material box, and mark the third feature 4 on the material to be grabbed.
[0037] The position of the material box 1 in the world coordinate system is obtained through the first feature 2 .
[0038] The camera 8 is calibrated by using the calibration plate to obtain the internal parameters of the camera ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More