

Calculating method, device and medium for vehicle previewing distance and steering control method
A technology for previewing distance and vehicle, which is applied in the direction of automatic steering control components, steering mechanism, steering rod, etc., to achieve precise vehicle steering control, accurate preview distance, and accurate calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to enable those skilled in the art to better understand the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0018] In the aforementioned prior art method, the following shortcomings can be found: 1) the curvature change of the desired path is not considered, such as when driving on a curve, the preview distance cannot be adjusted in time; 2) the relative position of the vehicle and the desired path is not considered If the vehicle has a certain lateral distance from the expected path or has a certain angle to the expected path, the preview distance cannot be adjusted accordingly.
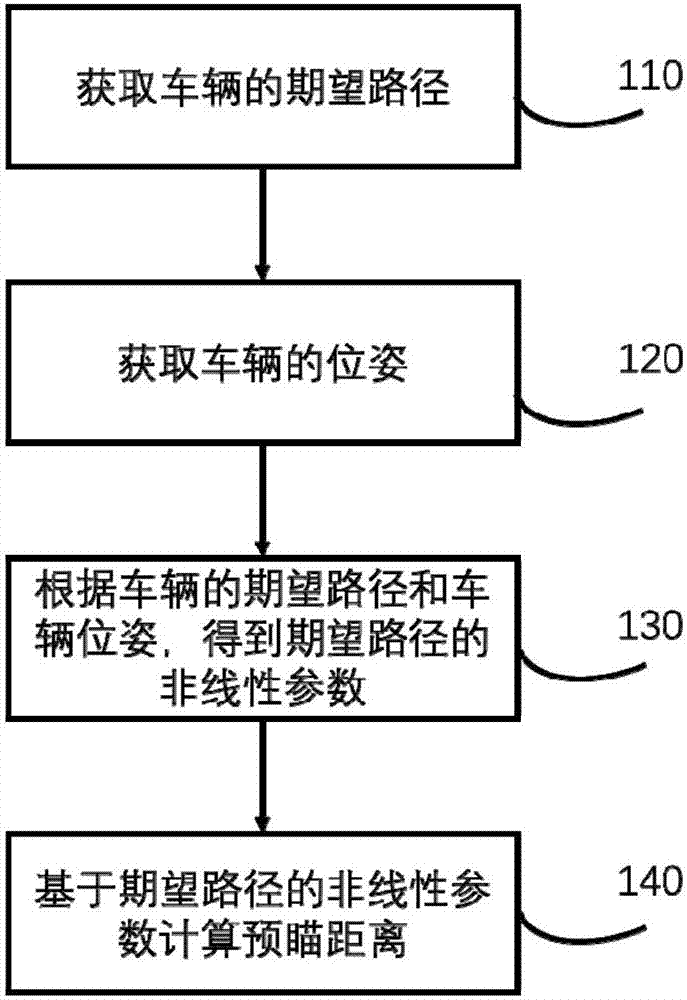
[0019] The present invention considers the nonlinearity of the expected path to reflect the curvature change of the expected path, and introduces the nonlinear parameter of the expected path into the calculation of the preview distance.
[0020] figure 1 A flow chart of a met...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More