

Active-lane-changing collision-avoidance control method and device based on vehicle-vehicle coordination
A control method and collision avoidance technology, applied to control devices, vehicle components, transportation and packaging, etc., can solve problems such as mutual interference between system control units, inattention, and failure to give the driver operation prompts, so as to save costs, The effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
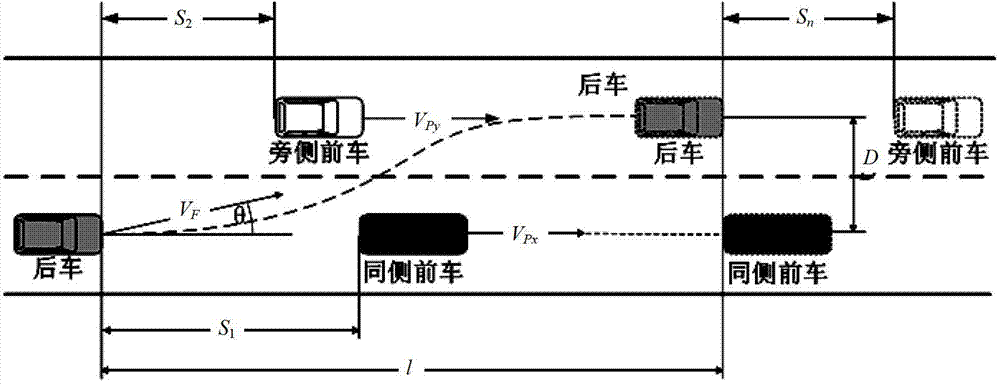
[0047] The active lane change and collision avoidance control device and method based on vehicle-vehicle coordination provided by the present invention are all applied to a method for determining a safe distance between vehicles, combined below figure 1 The method for determining the safe inter-vehicle distance according to the present invention will be described.
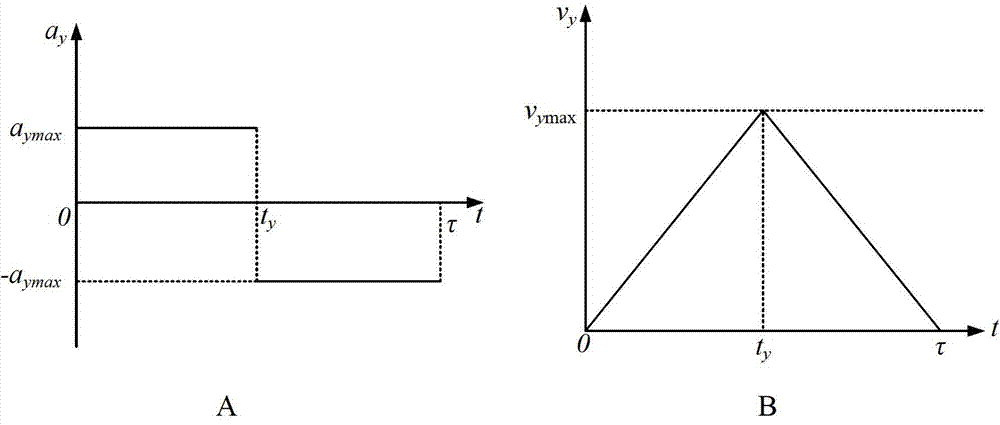
[0048] Step 1: The vehicle is running on a fixed road, and the maximum lateral acceleration is a under the condition that the vehicle is safe to drive ymax , the maximum deceleration is a xmax , since the legal road width D is fixed at 375cm, the method to obtain the minimum lane-changing time is as follows: figure 2 A is shown, with the maximum lateral acceleration a ymax Accelerate driving to 1 / 2*D, then reverse max lateral acceleration-a ymax When driving to D, the minimum lane-cha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More