Negative pressure type wall climbing robot
A wall-climbing robot and negative pressure technology, applied in the field of robotics, can solve the problems of not being able to monitor all the time, having no video monitoring function, and not being able to monitor dead-angle video and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
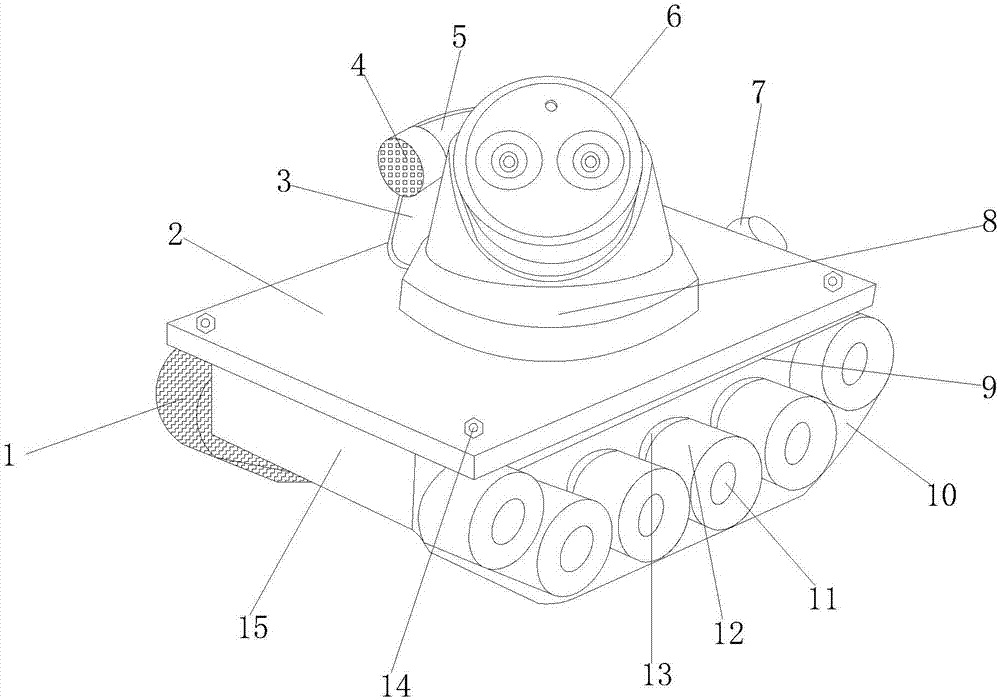
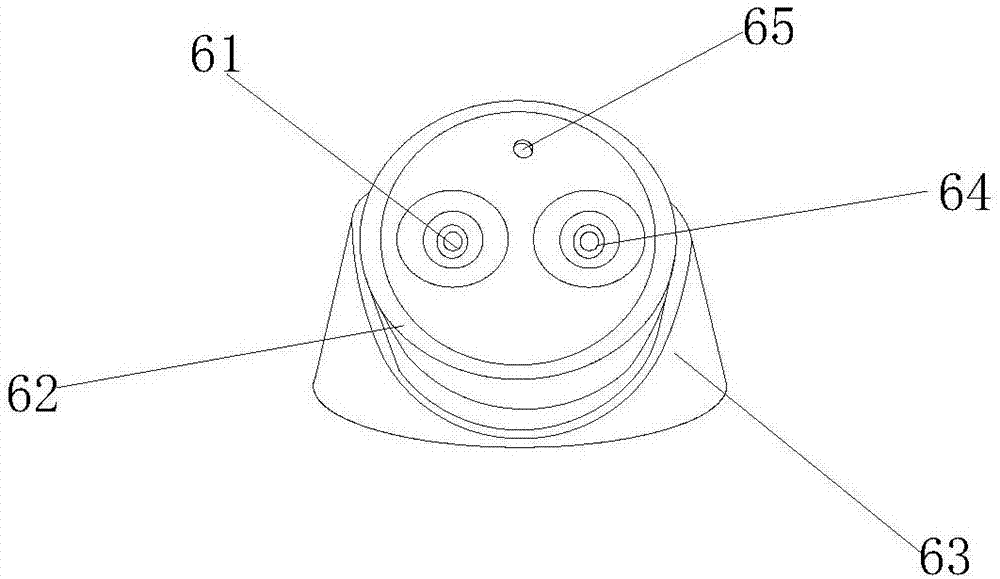
[0018] see figure 1 , figure 2 , the present invention provides a technical solution: a negative pressure wall-climbing robot, the structure of which includes a left crawler 1, a negative pressure control device 2, a support frame 3, an LED fill light 4, an LED controller 5, a monitor 6, Wireless receiver 7, rotating base 8, sealed air bag 9, right crawler belt 10, movable bearing 11, suction transmission gear 12, fixer 13, fixing bolt 14, host control device 15, described left crawler belt 1 and right crawler belt 10 In parallel, the left crawler belt 1 is connected to the right crawler belt 10 through the main engine control device 15, and the negative pressure control device 2 is arranged directly above the generator device 15, and the negati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com