

Bionic intelligent control method based on multi-connotation self-adjusting neural network
A neural network, intelligent control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems affecting the effectiveness of NN control methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0073] This embodiment is based on the bionic intelligent control method of multi-content self-regulating neural network, comprising the following steps:
[0074] Step 1. Design countermeasures against the application constraints of the universal approximation theorem, which includes:
[0075] (1) Construct the time-varying ideal synaptic connection weight, and the NN with time-varying ideal weight is expressed as
[0076]
[0077] Among them, the unknown time-varying ideal weight
[0078]
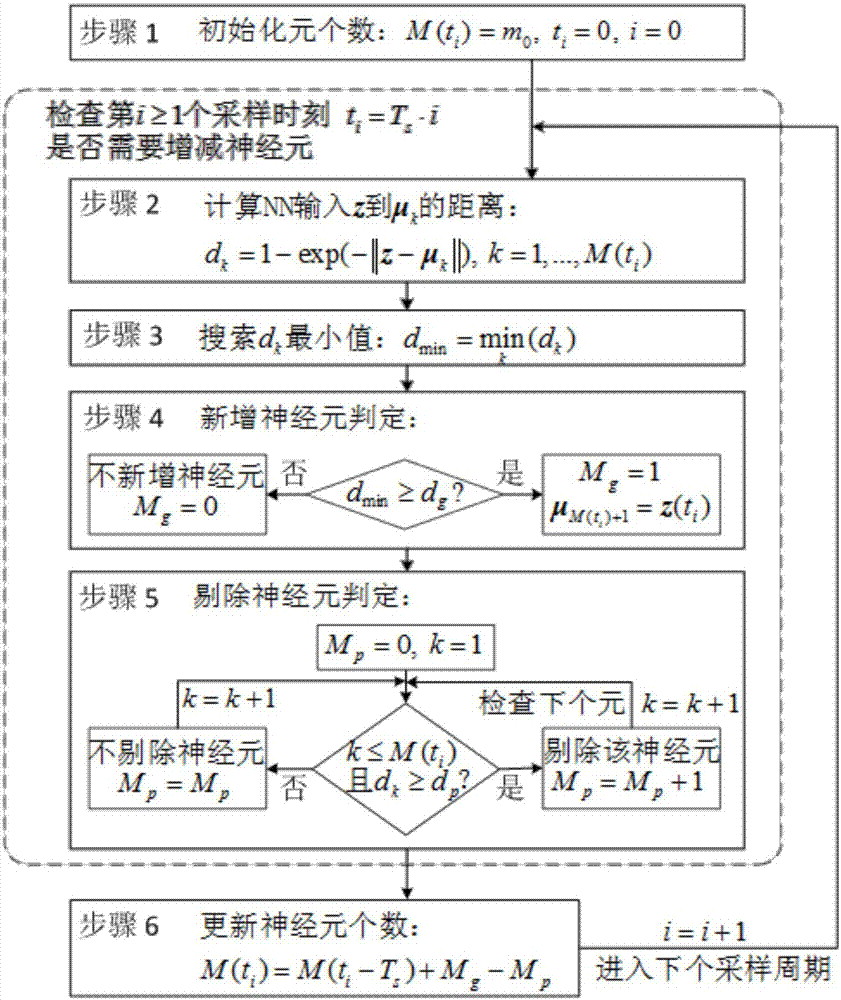
[0079] (2) Design an online self-regulation method for the number of neurons, the process is as follows figure 1 As shown, it specifically includes the following steps:
[0080] a. At t=t 0 = 0, the number of neurons in the initialization system is M(t i ) = m 0 , i=0; in order to prevent the asymptotic function failure of NN caused by too few neurons, m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More