

Method of path planning based on improved ant colony algorithm
An ant colony algorithm and path planning technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc. The problem of slow convergence speed of the swarm algorithm can shorten the convergence time of the algorithm, reduce the calculation time, and improve the operation efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
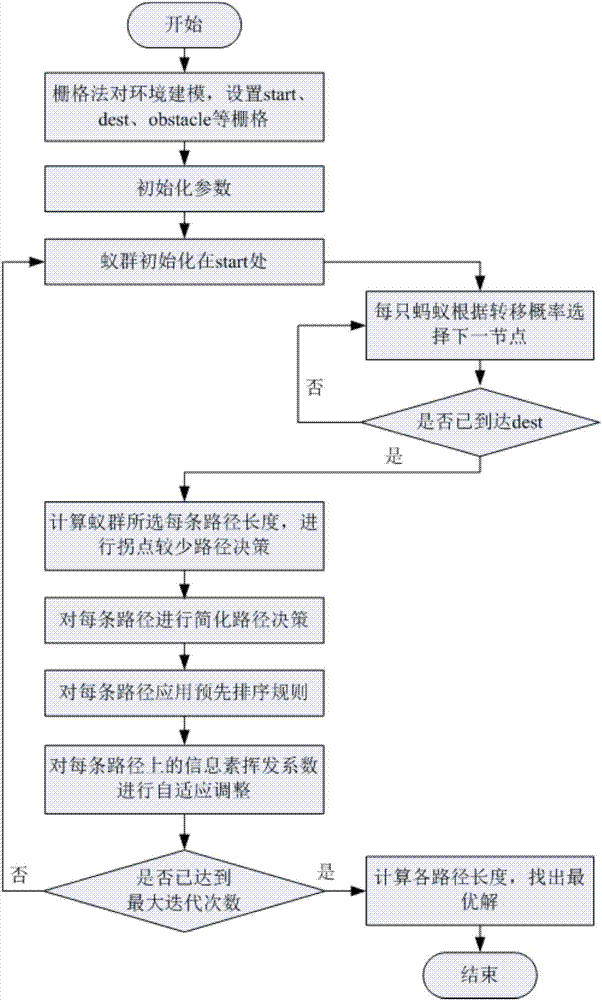
[0030] figure 1 The flow chart of the path planning method of the present invention is shown. In the present invention, we use MATLAB simulation software to simulate and calculate, as figure 1 As shown, the path planning method based on the ant colony algorithm first performs environment modeling and initialization, and then performs search iterations. After each round of iteration is completed, the feasible path information is counted, and different path decision rules are applied to all feasible paths. The algorithm is improved to get the optimal path faster. The specific steps are described in detail below.
[0031] Step 1. Use the grid method to model the map environment, and set the start node, dest target node, obstacle and other grids.
[0032] Step 2. Initialize the basic parameters of the ant colony algorithm, and manually give th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More