

Transforming robot capable of realizing wheel and track replacement
A technology of robots and wheel shoes, which is applied in the field of deformed robots and wheel-shoes replacing deformed robots, to achieve the effects of easy production and manufacturing, increasing motion modes, and improving self-adaptive capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in combination with the accompanying drawings and specific embodiments.
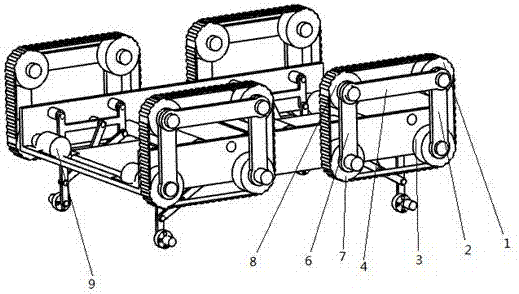
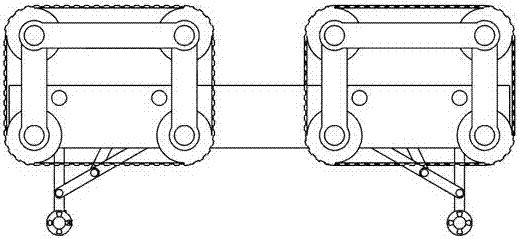
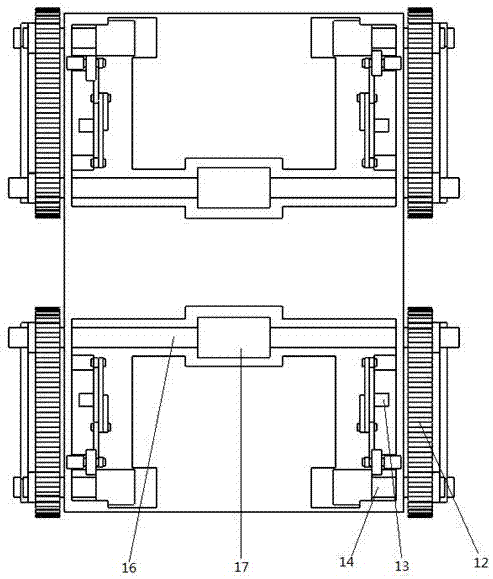
[0025] like Figure 1-Figure 8 As shown, a deformable robot that can realize wheel and shoe replacement includes: a chassis 11, and also includes a deformable crawler mechanism and a wheel-shoe replacement mechanism, and the chassis 11 is connected to at least three deformable crawler mechanisms and at least three wheel The track replacement mechanism supports the chassis 11, and the deformable track and the wheel track replacement mechanism are all installed on the chassis 11.
[0026] Each deformable track mechanism includes: track 12, driving rod 6, driven rod 2, track driving wheel 3, track driven wheel I1, track driven wheel II7, track driven wheel III8, track deformation drive motor 9, shaft I14, shaft II16, crawler driving motor 17, connecting rod 4; shaft I14 and shaft II16 can be detachably installed on the chassis 11, crawler deforma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More