

UAV obstacle avoidance method and UAV
An unmanned aerial vehicle and obstacle avoidance technology, applied in the electronic field, can solve the problems of low flying efficiency of unmanned aerial vehicles, and achieve the effect of autonomous obstacle avoidance and flying around and improving the flying efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The implementation of the present invention will be described in detail below with reference to the drawings and examples, so as to fully understand and implement the implementation process of how to use technical means to solve technical problems and achieve technical effects in the present invention.
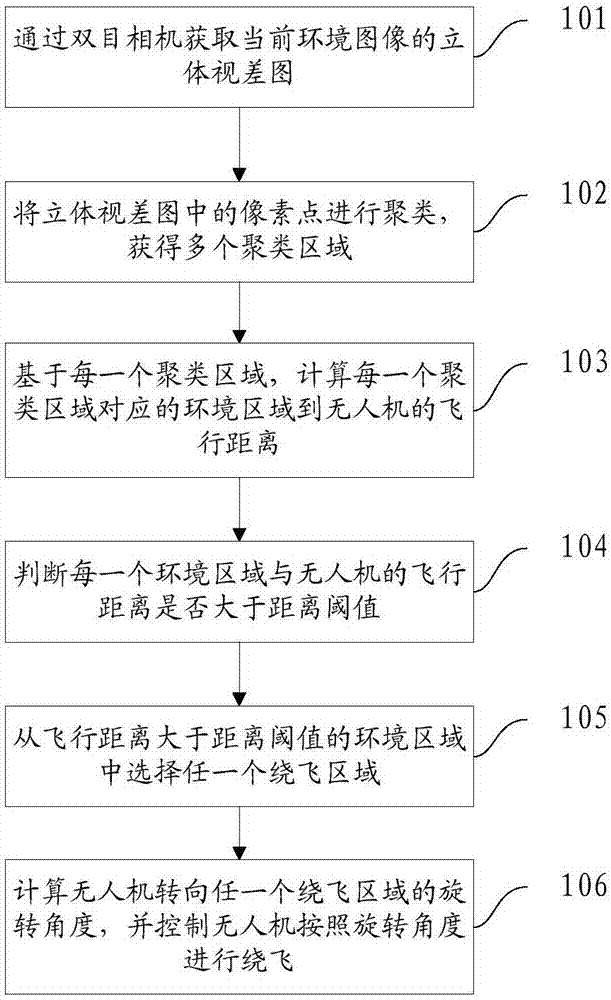
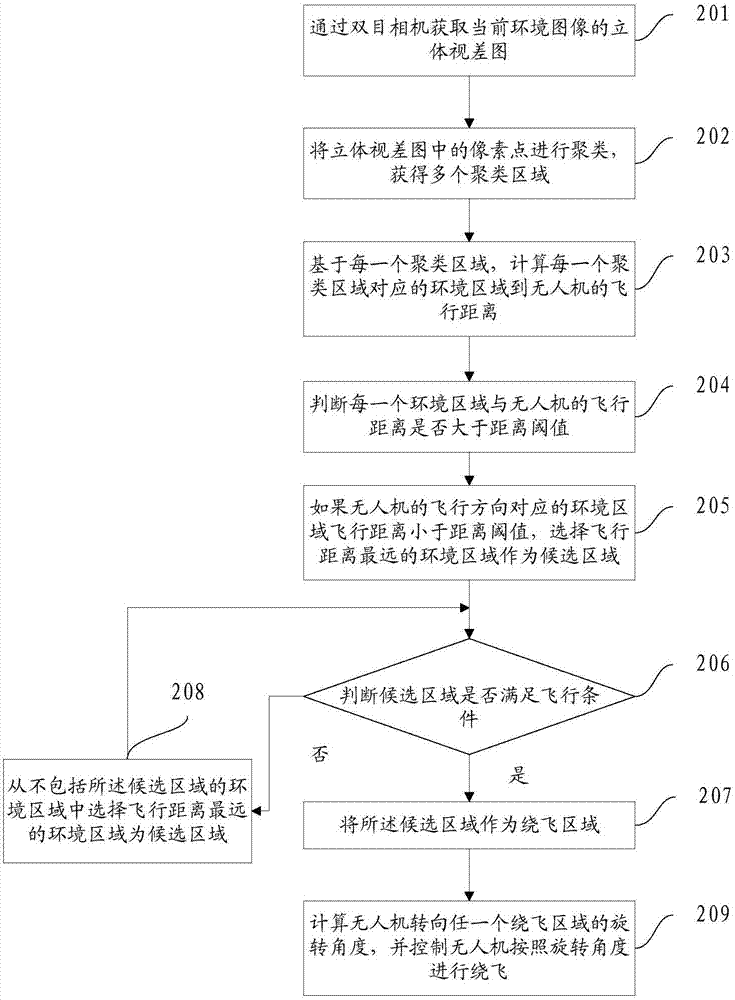
[0080] With the rapid development of electronic technology, UAVs are widely used in aerial photography, cargo delivery, resource exploration, route survey and other fields. The autonomous flight of drones requires automatic obstacle avoidance to ensure the flight safety of drones. Existing automatic obstacle avoidance methods can include video-based obstacle avoidance, but the current video-based autonomous obstacle avoidance method is to hover when encountering obstacles, unable to continue flying, and can only send images back to the ground station to recalculate the flight Obstacle-avoiding flight after the route, which has many restrictions on use, resulting in low ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More