

Anthropomorphic reference track planning method for unmanned driving
A reference trajectory, unmanned technology, applied in the field of unmanned vehicle navigation, can solve the problems of low efficiency, vehicle dynamics characteristics, driving habits and ride comfort, and it is not suitable for unmanned vehicle driving and navigation. Achieve the effect of ensuring feasibility, improving comfort, and reducing difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below with reference to the drawings and embodiments.
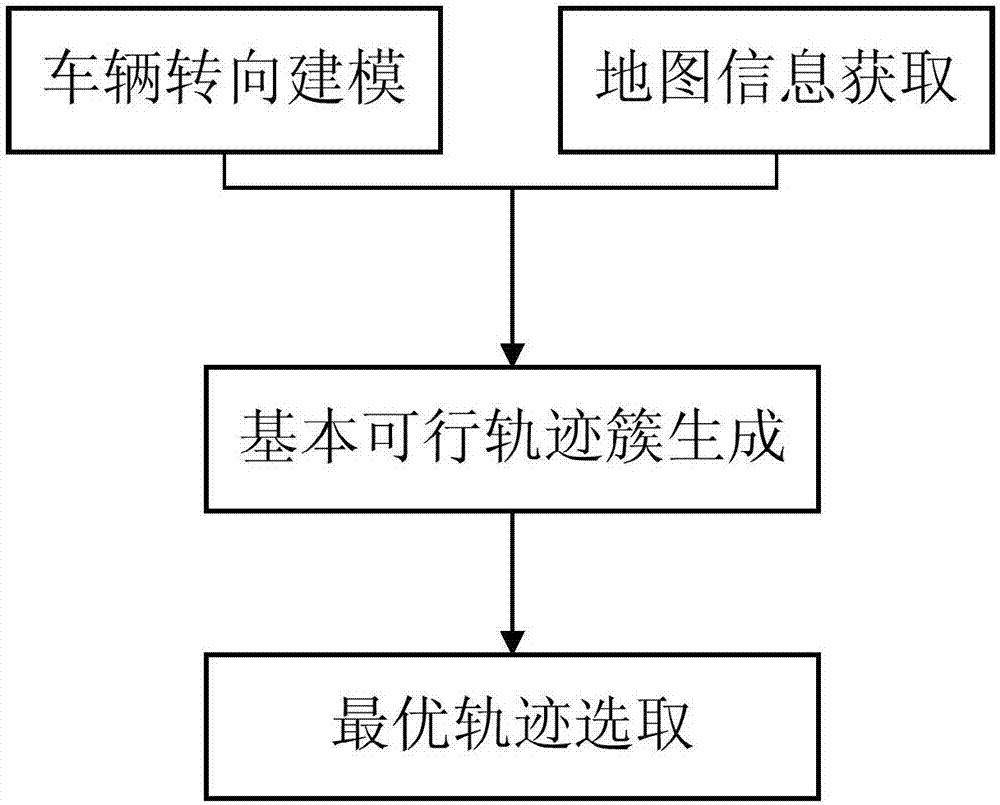
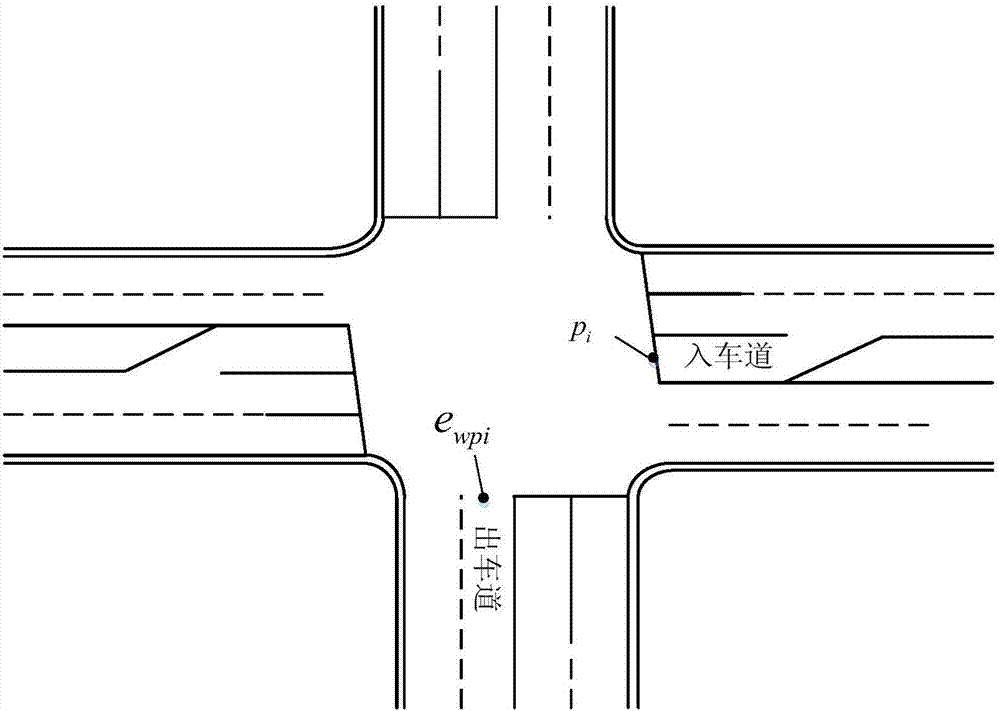
[0048] Such as figure 1 As shown, the present invention provides an anthropomorphic reference trajectory planning method for unmanned driving, which is suitable for the planning of the reference driving trajectory inside the intersection in the intersection scene of the unmanned vehicle, and specifically includes the following steps:
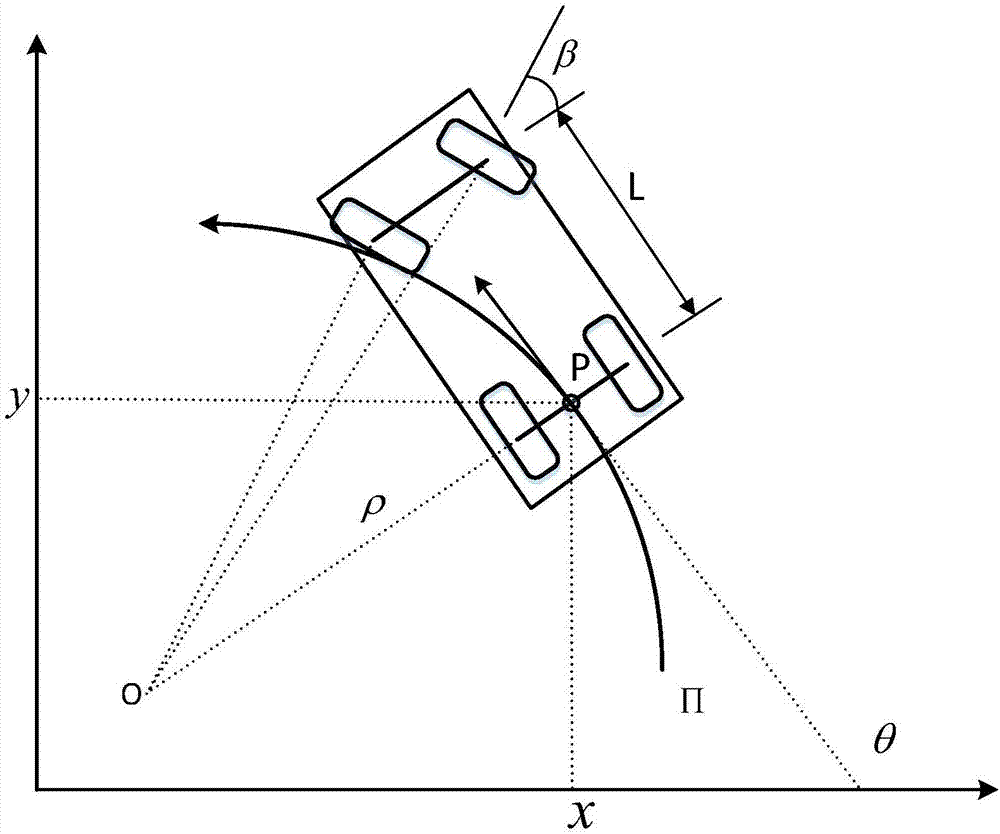
[0049] 1) Vehicle steering modeling: establish a vehicle steering model, and generate dynamic constraints when the vehicle is steering according to the basic parameters of the vehicle.
[0050] Such as figure 2 As shown, the turning trajectory curve Π is the trajectory swept by the midpoint P of the rear axle of the vehicle. At point P, the tangent of the turning trajectory curve Π is parallel to the direction of the vehicle body, and the instantaneous radius ρ is the turning radius of the vehicle at this moment. The curvature-arc length p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More