

An asymmetric over-constrained five-degree-of-freedom hybrid robot
A degree of freedom and over-constraint technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of unfavorable real-time control, affecting the dynamic performance of robots, and the mass of the robot's moving platform, so as to reduce the quality of the whole machine, Less number of hinge degrees of freedom and lower manufacturing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] An asymmetric over-constrained five-degree-of-freedom hybrid robot of the present invention will be described in detail below in conjunction with the embodiments and drawings.
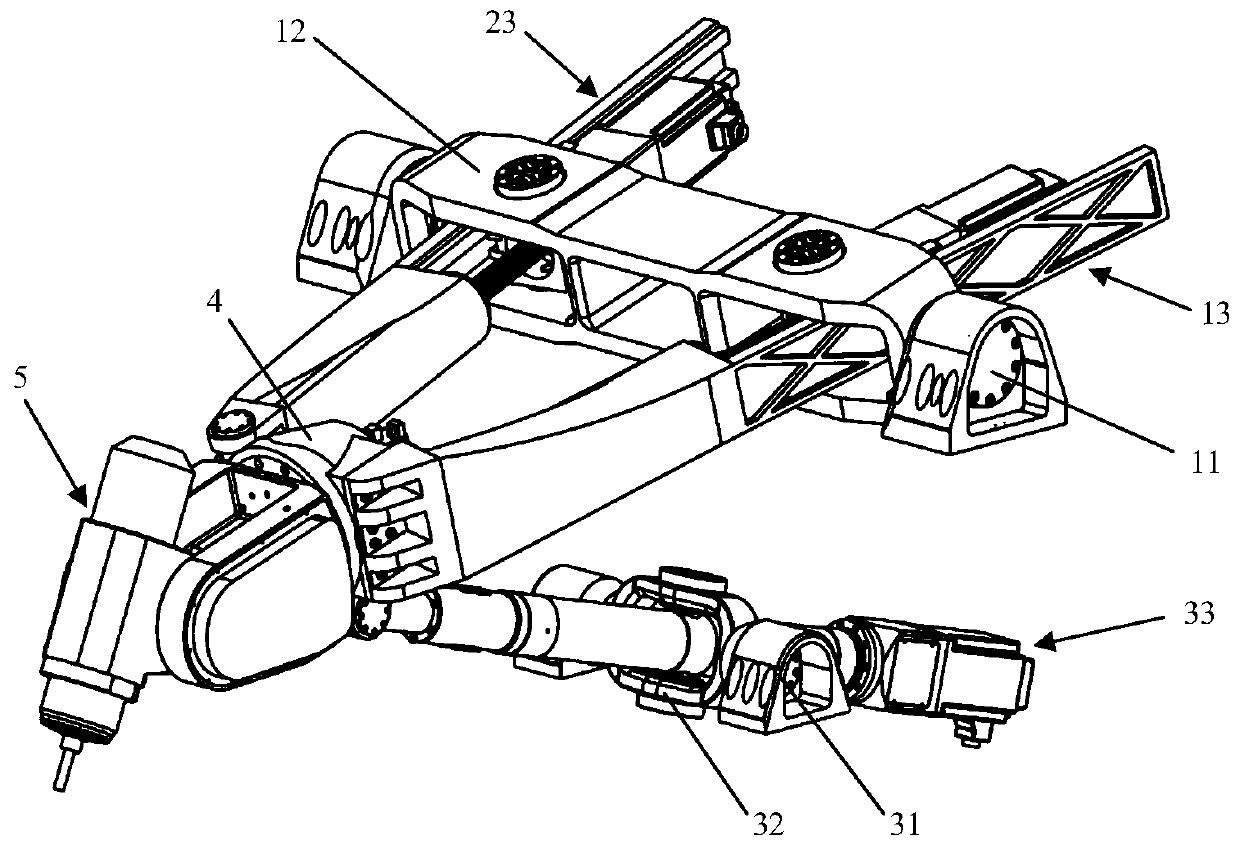
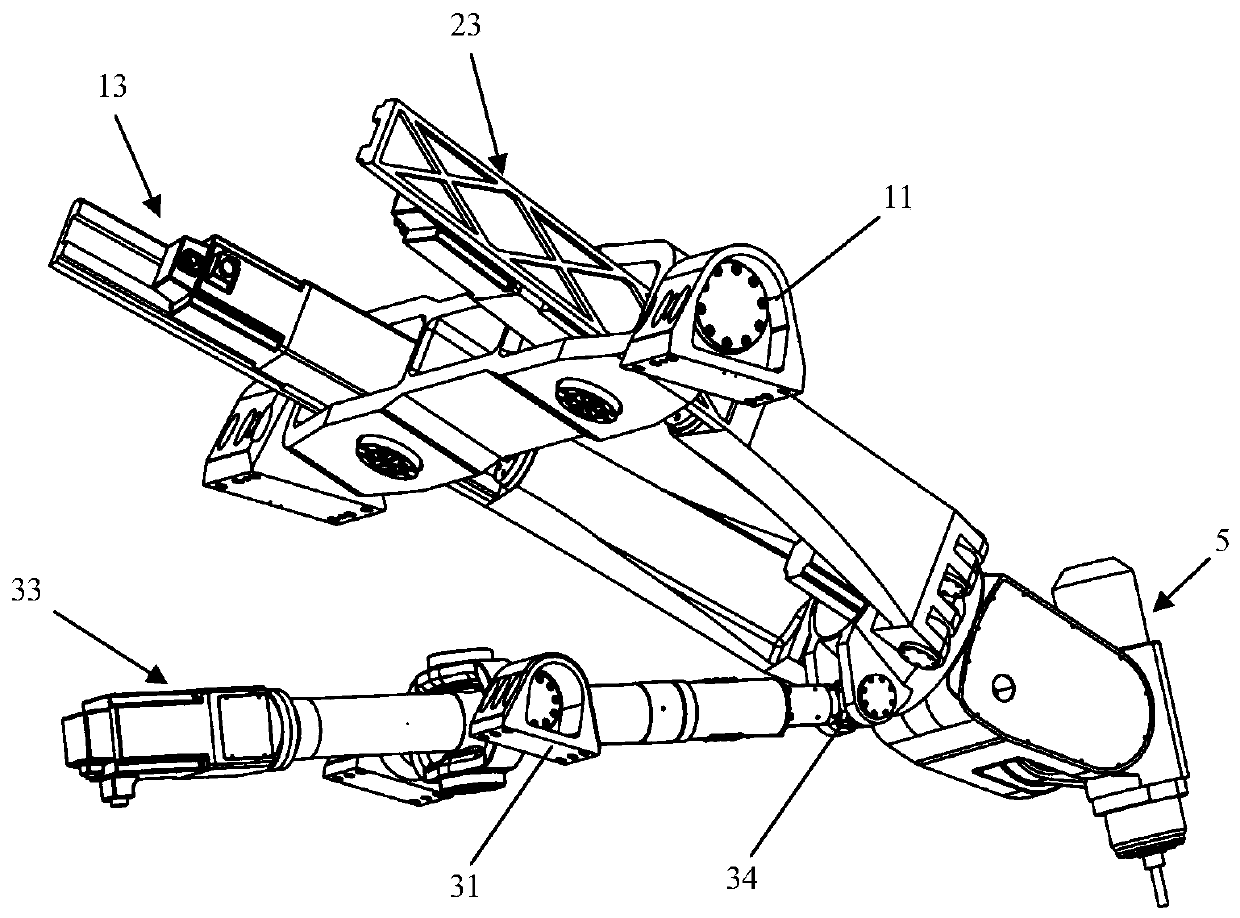
[0046] Such as figure 1 , figure 2 As shown, an asymmetrical over-constrained five-degree-of-freedom hybrid robot of the present invention includes a moving platform 4, and a positioning head 5 is connected in series at the end of the moving platform 4, and the positioning head 5 is a two-degree-of-freedom A / C Shake your head. Both sides of the moving platform 4 are respectively connected to one end of the first active length adjusting device 13 and the second active length adjusting device 23, wherein the first active length adjusting device 13 is fixedly connected to the moving platform 4, and the first active length adjusting device 13 is fixedly connected to the moving platform 4, and the second The two active length adjustment devices 23 are connected to the moving platform 4 through a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More