

Indoor mapping and positioning method based on target identification
An indoor positioning and target recognition technology, applied in the field of image processing and pattern recognition, can solve the problems of long process time, low amount of information, small amount of calculation, etc., and achieve the effect of small storage space and wide application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
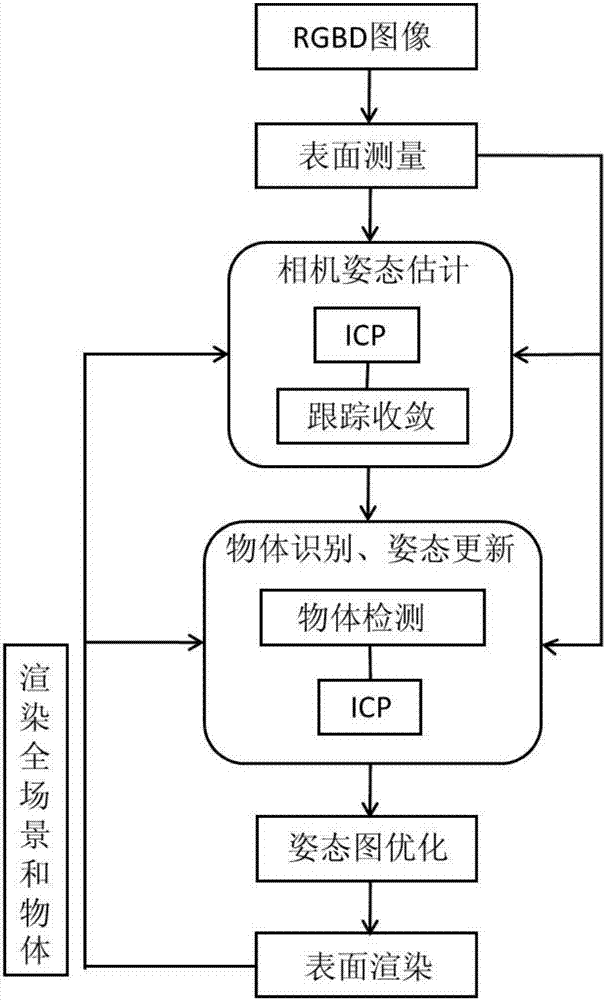
[0032] figure 1 It is an overall flowchart of the method of the present invention, and the method specifically includes the following steps:
[0033] 1. Calculate the object model
[0034] The application scene of the present invention is an indoor scene, before the real-time target detection, the target object model database is established offline earlier (this content is not shown in figure 1 middle).
[0035] The method of setting up target object model database is, through existing three-dimensional reconstruction method namely KinectFusion method (R.A.Newcombe, S.Izadi, O.Hilliges, D.Molyneaux, D.Kim, A.J.Davison, P.Kohli, J.Shotton, S. Hodges, and A. Fitzgibbon. KinectFusion: Real-Time Dense SurfaceMapping and Tracking. In Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR), 2011.) Scan the object, get the result...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More