Modular spherical soft robot connected by magnetic force
A magnetic connection and modularization technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor reliability, complicated module connections, and incapable of batch modular production, so as to reduce costs, improve robustness, and improve The effect of module reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments
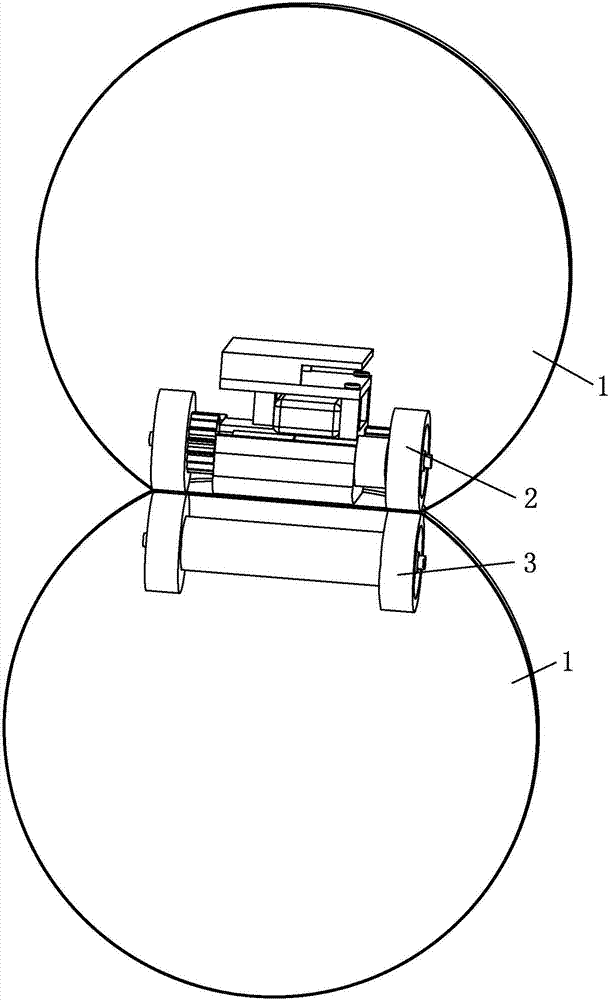
[0025] see Figure 1-Figure 6 Explain that the modular spherical soft robot connected by magnetic force includes several soft spherical shells 1 and several joint connections and driving mechanisms. Two adjacent soft spherical shells 1 are connected together through a joint connection and the driving mechanism. The shells 1 are interconnected to form a robot configuration;
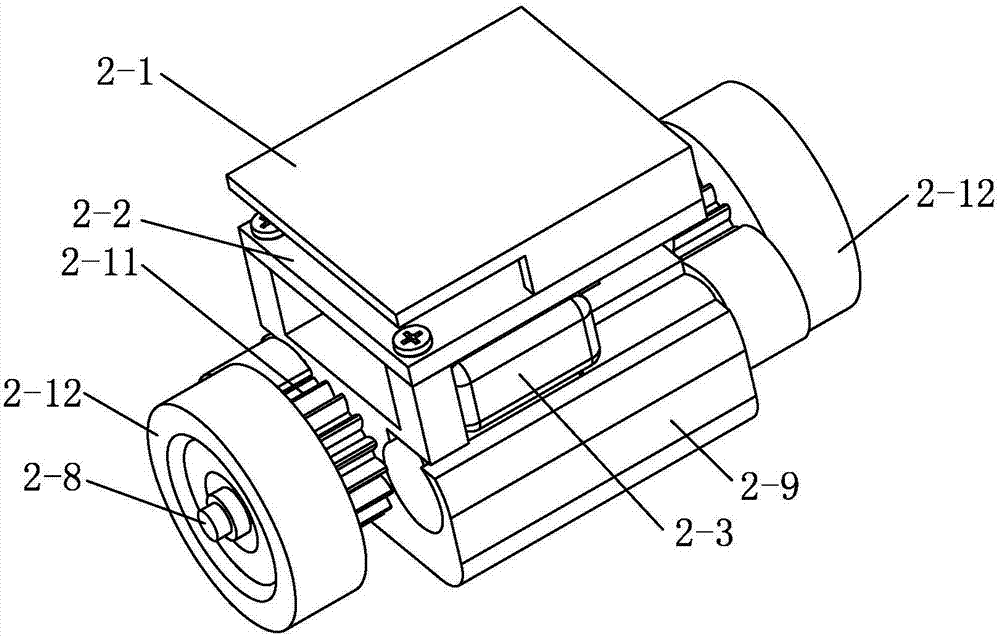
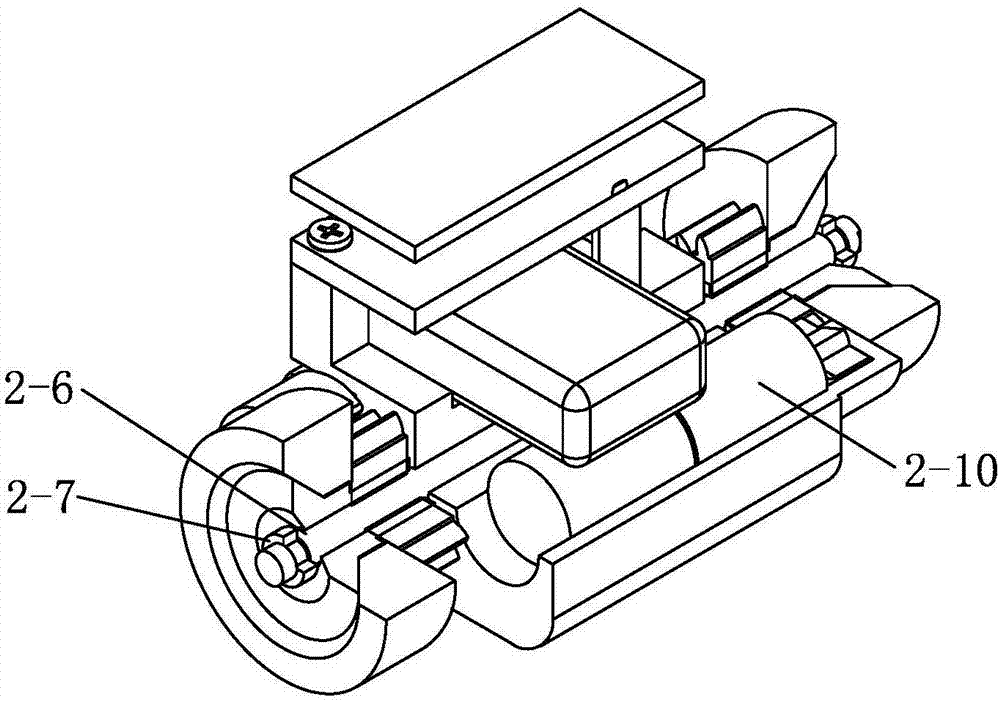
[0026] The joint connection and drive mechanism includes an active drive module 2 and a passive drive module 3; the active drive module 2 and the passive drive module 3 are respectively arranged in a soft spherical shell 1; the active drive module 2 includes a drive axle 2-8, a housing 2- 9. Two gear pairs 2-11, two active magnet wheels 2-12 and two motors 2-10; the passive drive module 3 includes a connecting piece 3-2 and two passive magnet wheel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More