Travelling mechanism of wall-climbing robot
A technology of a wall-climbing robot and a walking mechanism, which is applied in the field of robots, can solve the problems of uneven working wall, high cost, unsatisfactory stability and obstacle-crossing ability, etc., and achieves lower costs, fewer types of production workpieces, and good obstacle-crossing ability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation manners of the present invention will be described below in conjunction with the accompanying drawings.
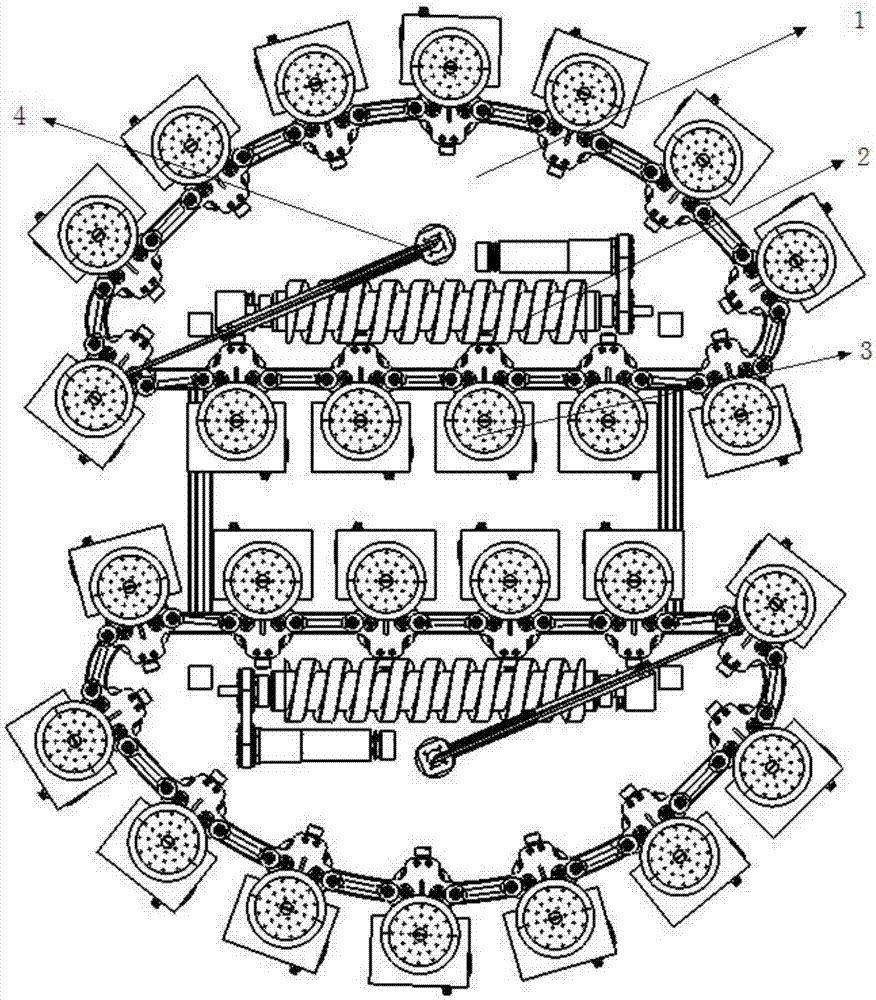
[0028] like figure 1 and figure 2 As shown, the walking mechanism of the wall-climbing robot includes: a carrying frame 1 , a walking transmission device 2 , an adsorption foot module 3 and a gas-electric rotary transmission mechanism 4 .
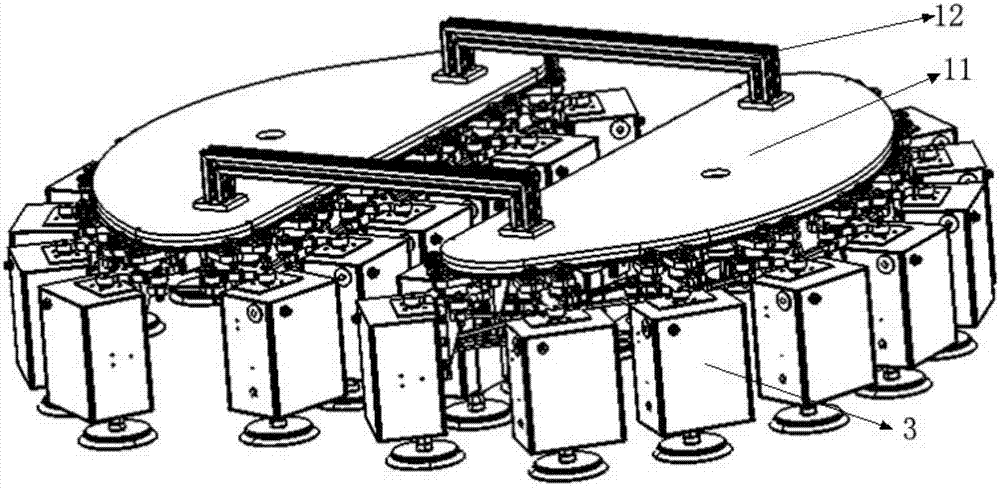
[0029] like figure 2 As shown, the carrying frame 1 includes a frame plate 11 and a supporting frame 12 . There are two frame plates 11, which are arranged symmetrically about the central point; the support frame 12 connects the two frame plates 11 as a whole by means of bolts or welding.
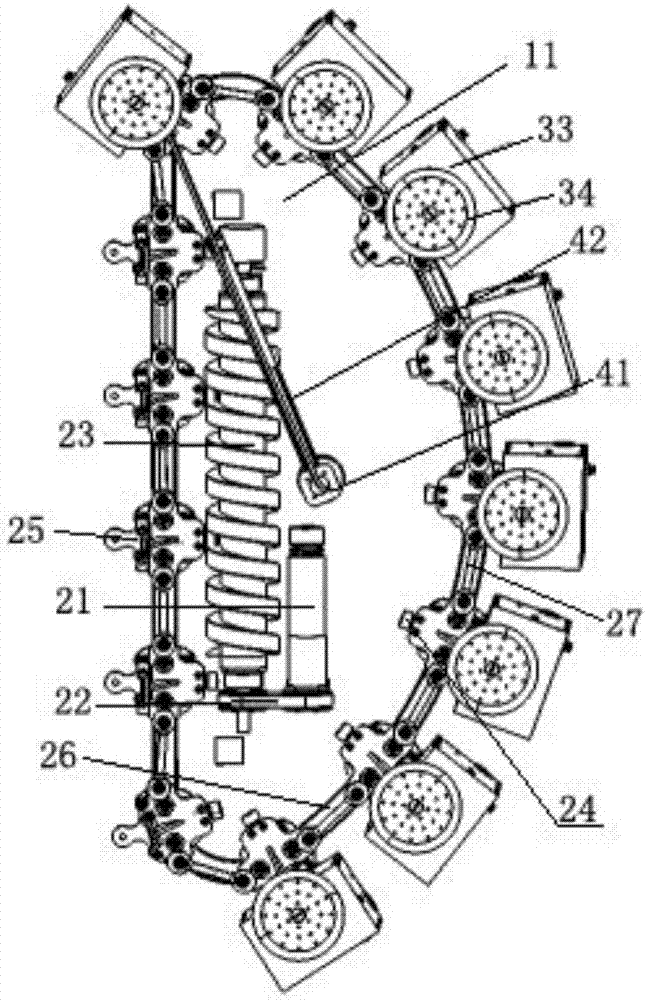
[0030] like image 3 As shown, the travel transmission device 2 includes a driving reduction motor 21, a synchronous pulley mechanism 22, a rectangular threaded screw 23, a driving roller 24, a guide slider 25, a closed-loop arc guide rail 26 and an eccentric linkage mechanism 27.
[0031] The drive reduction...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com