

Inspection robot system's vibration measurement control method
An inspection robot and control method technology, applied in instruments, measuring devices, measuring ultrasonic/sonic/infrasonic waves, etc., can solve the problems of automatic inspection and vibration measurement of equipment, and achieve simple and easy testing process, accurate data, The effect of avoiding security risks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
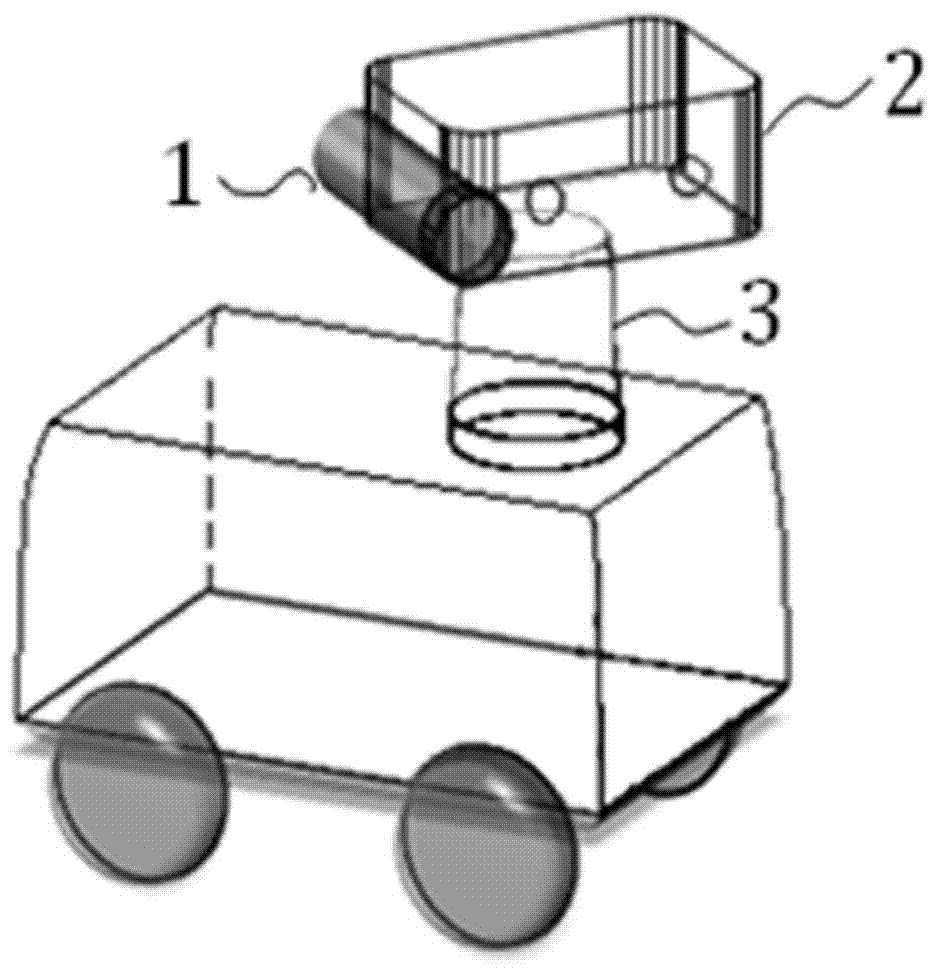
[0031] The invention proposes a vibration measurement control method for a patrol robot system. The patrol robot system includes: a patrol robot and a background system for data interaction with the patrol robot. Such as figure 1 As shown, in this embodiment, the inspection robot includes: a walking device, a pan platform 3, a vibration measuring laser head 1, a camera device 2 and a controller. The walking device is shaped like a trolley, and consists of a main body and four The drive wheel is formed, the pan-tilt 3 is installed on the main body of the walking device, the vibration measurement laser head 1 and the camera device 2 are installed on the pan-tilt 3, and the pan-tilt 3 can adjust the orientation and inclination of the vibration measurement laser head 1 and the camera device 2 Angle, etc., the controller performs data interaction with the background system through the wireless communication network, and the walking device, pan / tilt, vibration measuring laser head a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More