

Unmanned aerial vehicle formation obstacle avoidance priority on-line configuration method based on collision cone
A configuration method and UAV technology, applied in three-dimensional position/channel control, vehicle position/route/height control, instruments, etc., can solve the problem of poor environmental adaptability of UAV formation obstacle avoidance technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
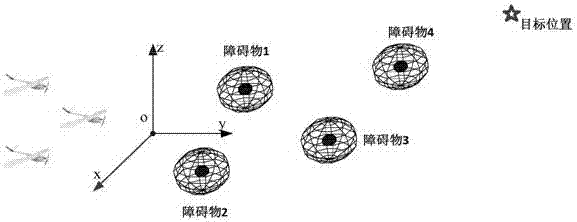
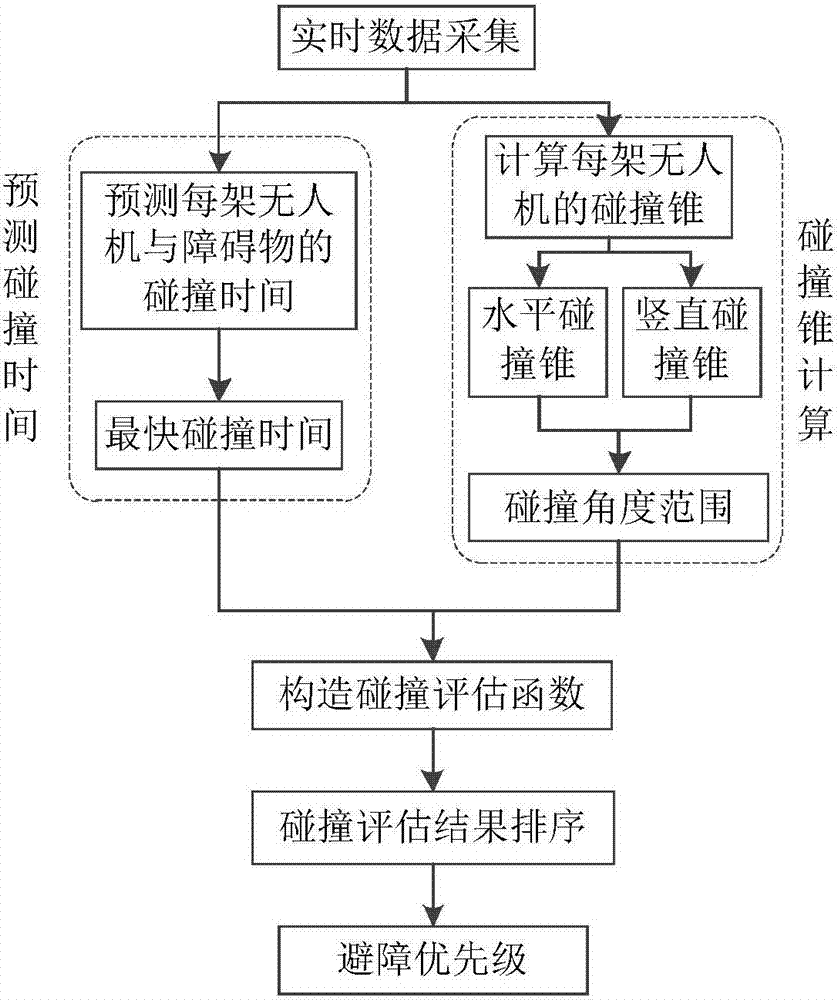
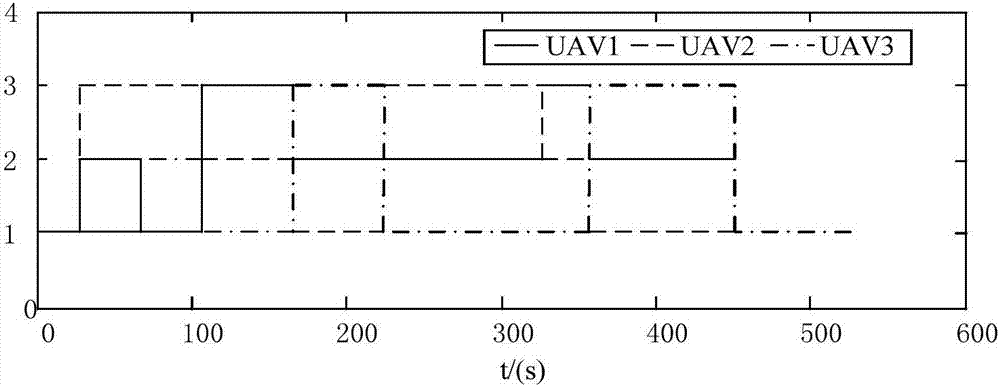
[0076] The invention discloses an on-line configuration method for UAV formation obstacle avoidance priority based on collision cones, which includes four steps: Step 1, collect the real-time position and speed of each UAV in the formation and obstacles in the environment, and use This is based on predicting the fastest collision time between each UAV and an obstacle in the formation; Step 2, calculate the collision angle range of each UAV according to the collision cone theory; Step 3, construct a collision evaluation function, combined with the fastest Collision time and collision angle range, calculate the maximum overload that each UAV needs to perform in order to avoid obstacles; Step 4, compare the urgency of the collision assessment of each UAV, and according to the urgency from large to small In order, the priority of obstacle avoidance from high to low is assigned to the corresponding UAV in turn.
[0077] The present invention will be further described below in conju...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More