

Method and device for determining and correcting error of inverse kinematics solution method of manipulator
An inverse kinematics and robotic arm technology, which is applied in the field of error determination and correction of the inverse kinematics solution method of a robotic arm, can solve the problems such as the inability to determine the error of the inverse kinematics solution method online in real time, and the inability to correct the data error in time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to enable those skilled in the art to better understand the technical solutions in the present application, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application. Obviously, the described The embodiments are only some of the embodiments of the present application, but not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without creative efforts shall fall within the scope of protection of this application.
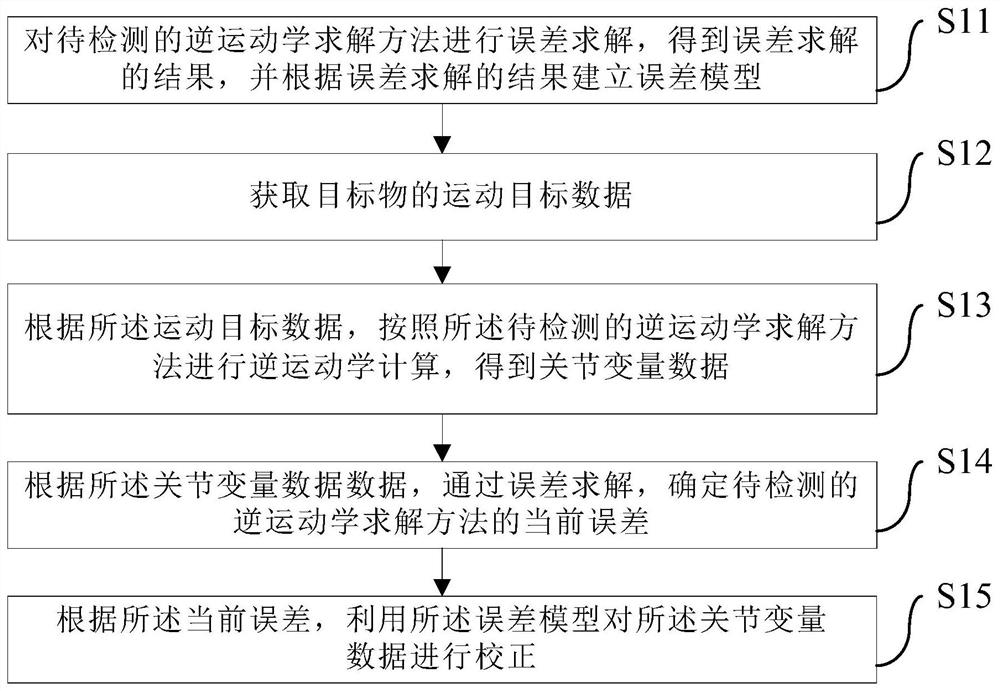
[0054] Considering the existing method for determining the error of the inverse kinematics solution method of the manipulator, since the process of determining the error of the inverse kinematics solution method itself is relatively cumbersome, it is often only possible to use a priori method to determine the inverse kinematics used before...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More