

Unmanned ship device and sampling method for automatic sampling of water quality
A technology of automatic sampling and water quality sampling, which is applied in sampling devices, special-purpose vessels, motor vehicles, etc., can solve the problems of inflexible expansion of the number of sampling bottles, inability to control the depth of water sample collection, and difficulty in meeting the application occasions, etc., to achieve improved Water quality sampling efficiency and detection timeliness, saving management costs, compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
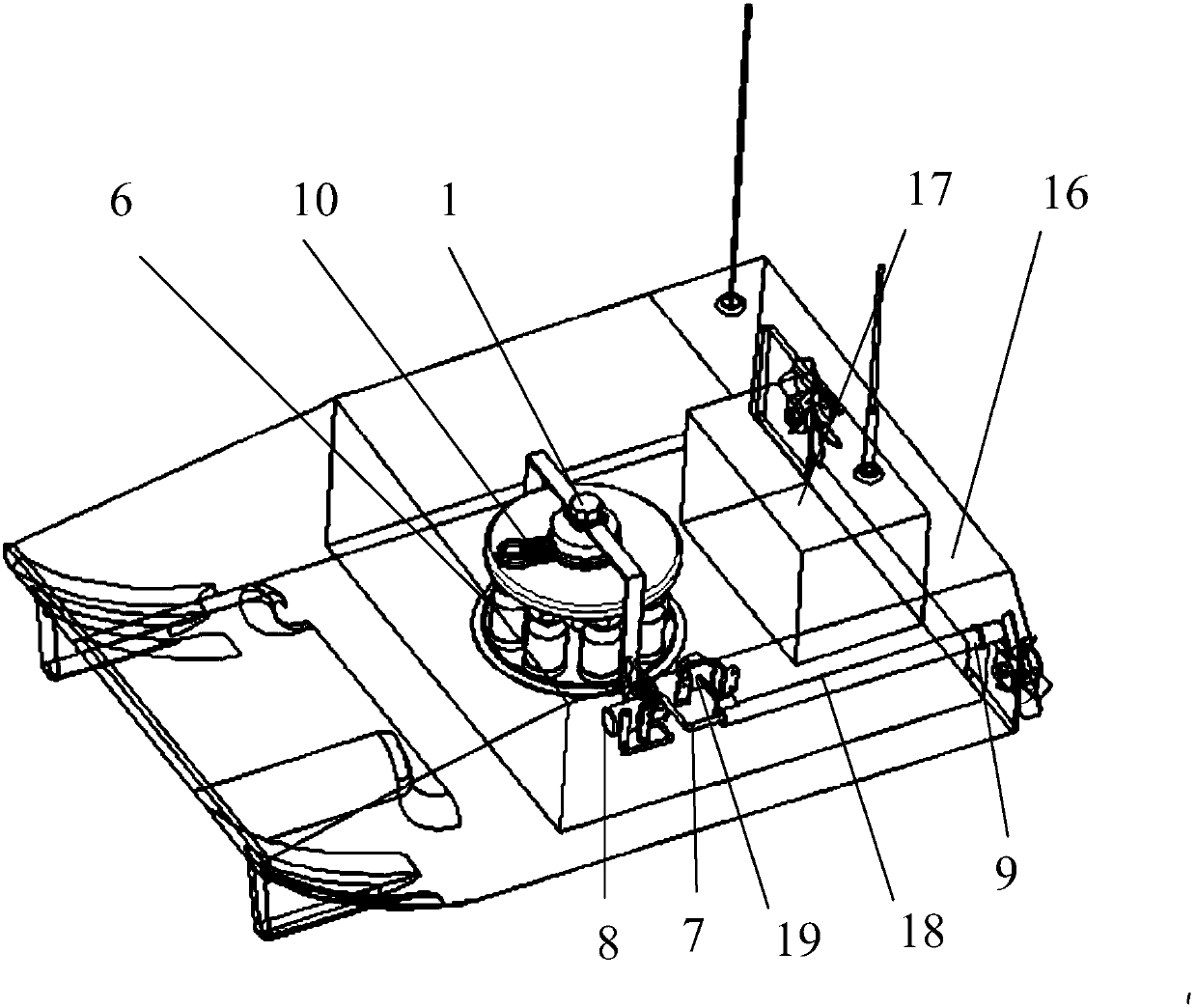
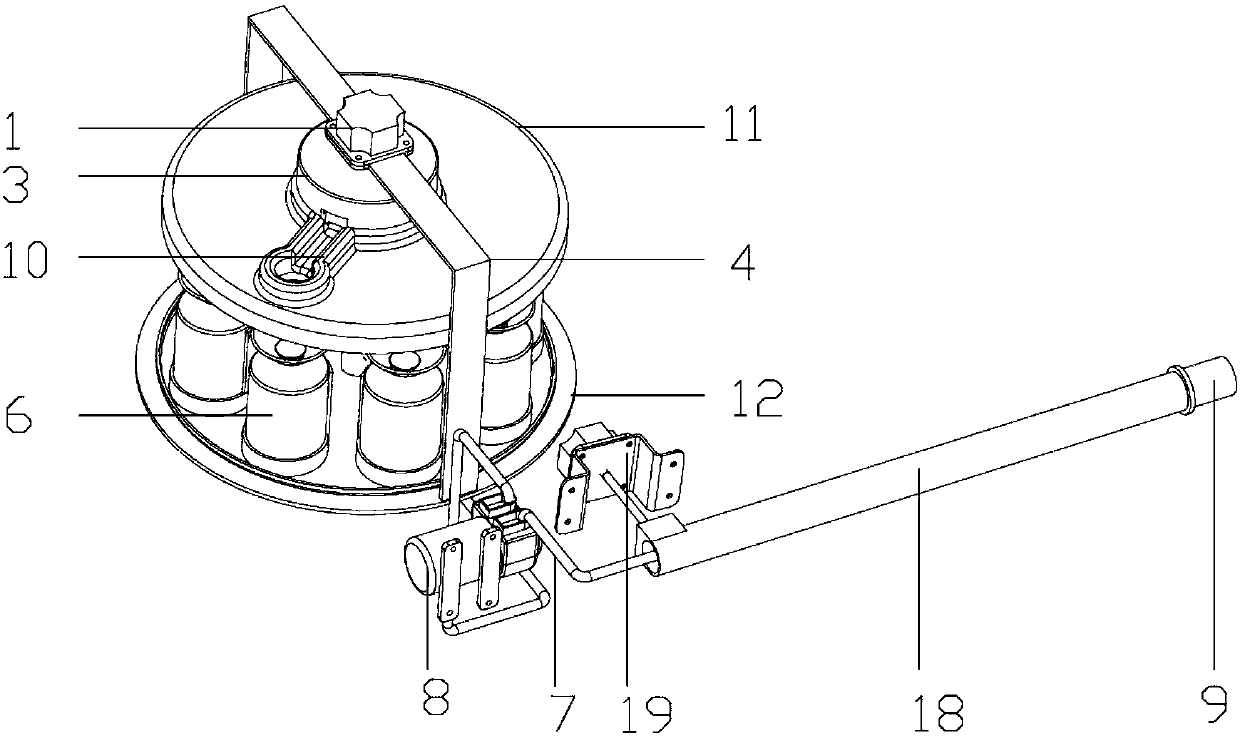
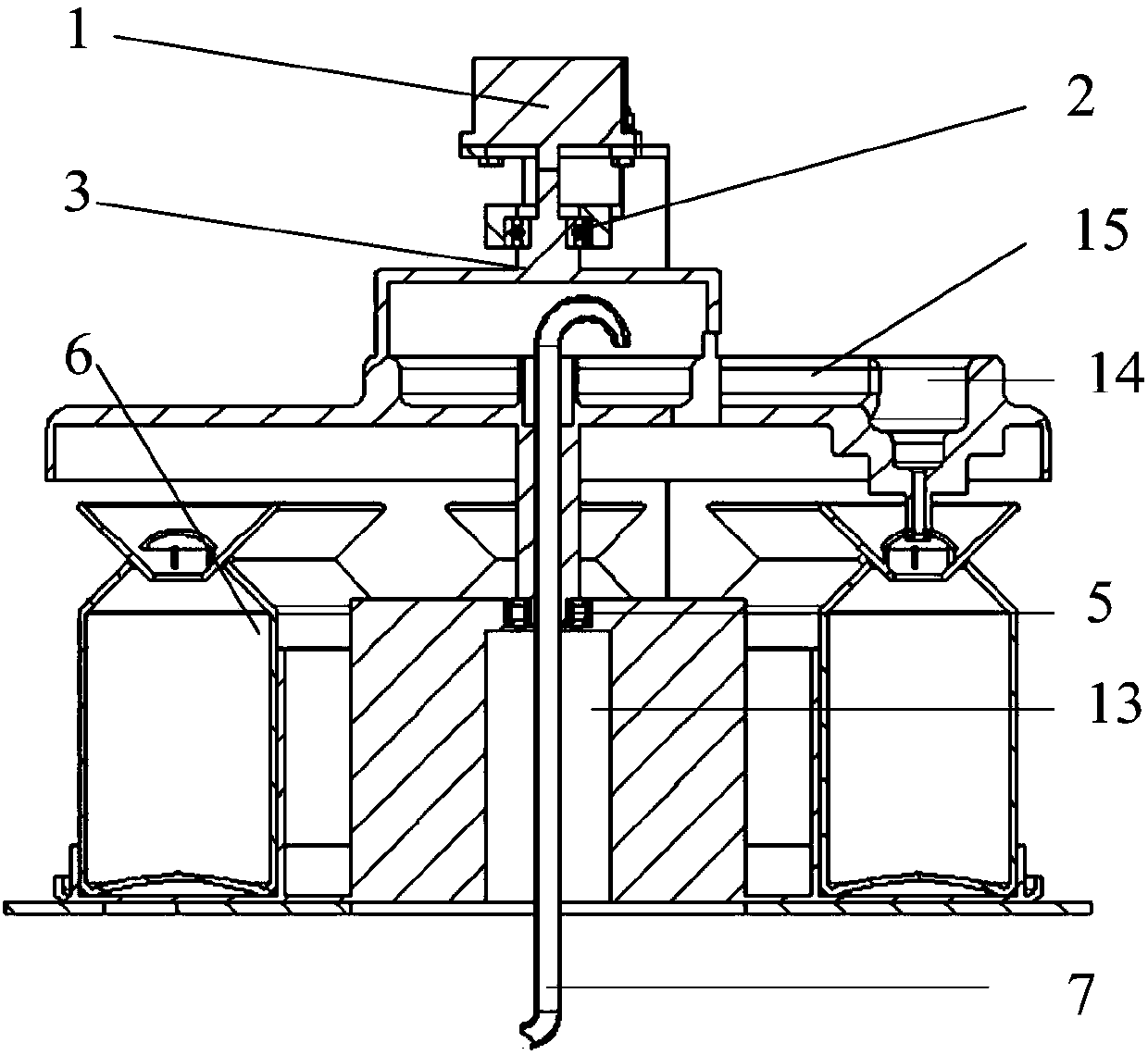
[0047] The invention provides an unmanned ship device for automatic sampling of water quality, such as figure 1 , figure 2 , image 3 As shown, a preferred embodiment of the present invention is shown therein. Specifically, such as figure 1As shown, the unmanned ship device includes an unmanned ship main body 16, an energy source and control unit 17 disposed in the unmanned ship main body 16 cabin and an automatic water quality sampling unit, and the automatic water quality sampling unit includes a sampling bottle 6, The support body mechanism of the sampling bottle 6 is installed, the sampling pump 8 arranged on the outside of the unmanned ship main body 16, the sampling hose 7 connected to the sampling pump 8 and the swing arm water intake mechanism that controls the rotation of the sampling hose 7. The swing arm water intake mechanism includes a hollow tube 18 nested outside the end section of the sampling hose 7 and a first stepper motor 19 connected to the end of the ...
Embodiment 2
[0072] The present invention also provides a water quality automatic sampling method of an unmanned ship device, such as Figure 4 ~ Figure 10 As shown, a preferred embodiment of the present invention is shown therein. Specifically, the automatic sampling method of water quality comprises the following steps:
[0073] A. If Figure 4 As shown, the unmanned ship device is controlled by the program or remote command to sail to the sampling point, and the swing arm water intake mechanism is in a horizontal state under the sailing state.
[0074] B. If Figure 5 As shown, after the unmanned ship device reaches the sampling point, the first stepper motor drives the hollow tube to rotate, so that the lower end of the sampling hose and the filter head are immersed in the water, and the angle of the hollow tube is adjusted according to the requirements of the sample collection depth.
[0075] C. If Figure 6 As shown, the second stepper motor is controlled to drive the groove guid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More