

Underactuated robot self-organizing aggregation method based on binary environmental information
A technology of environmental information and robotics, applied in the field of group robots and full-drive robots, to achieve good robustness and scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
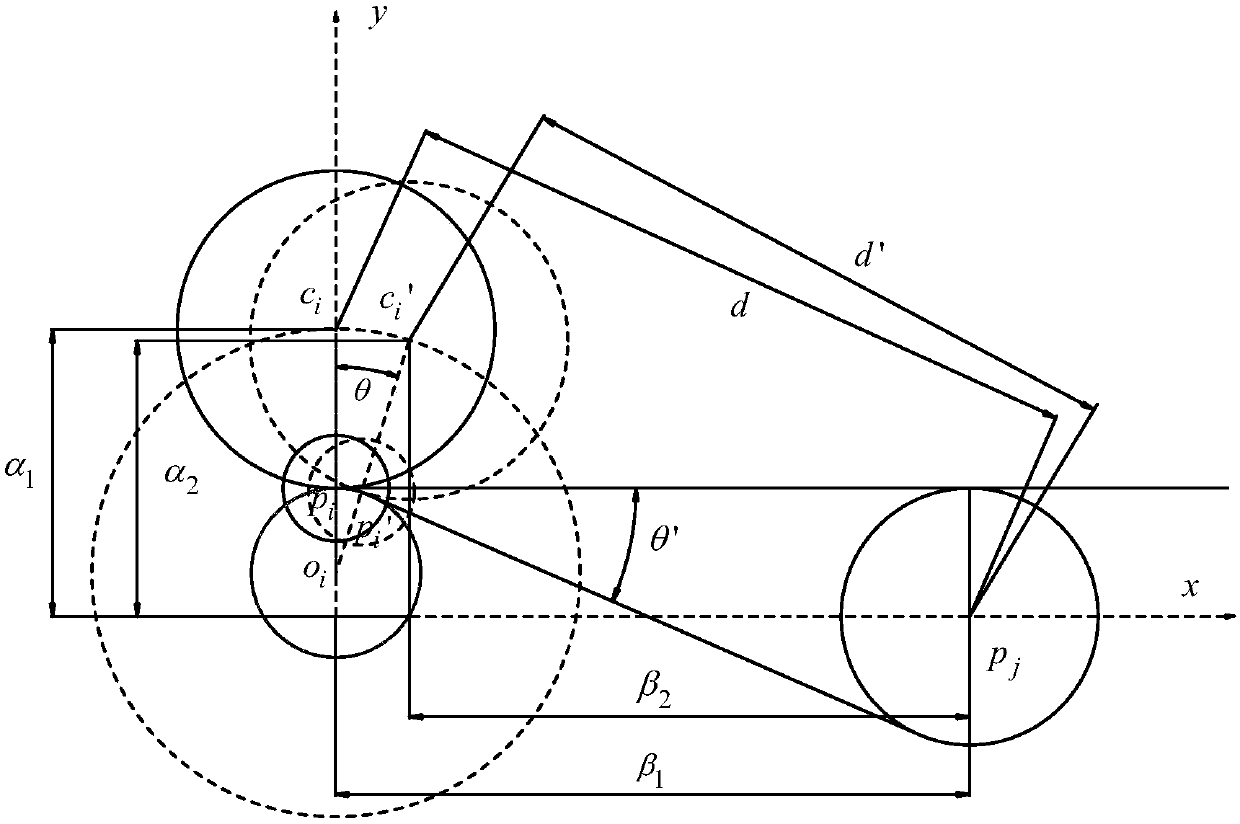
[0020] The purpose of the present invention is to propose a method, which does not require communication and positioning information between robots, but only needs a sensor to detect the surrounding environment information, and is used to judge whether there are other robots within the range of the sensor, so as to realize the autonomous operation of group robots. Organization gathers.
[0021] Concrete steps of the present invention are:
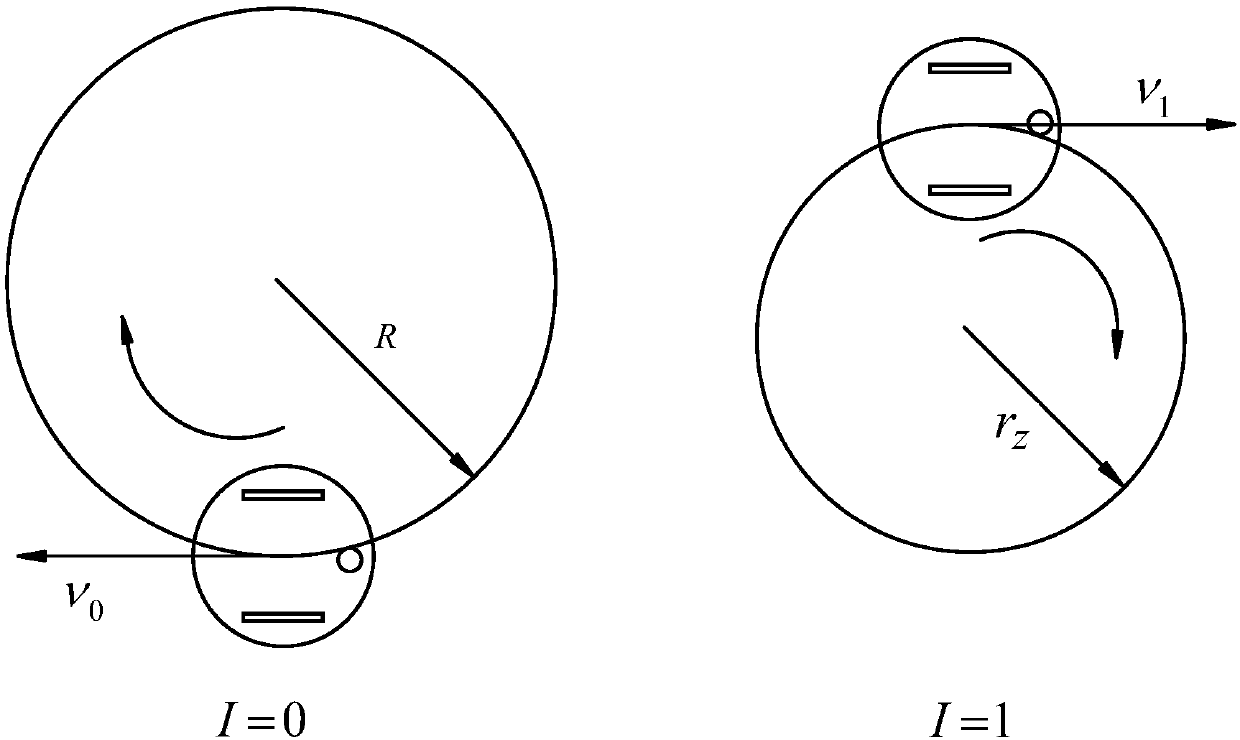
[0022] Step 1: The robot perceives whether there are other robots around through its own sensors, and the definition state I=0 represents that there are no other robots within the range of the robot's own sensors, and the state I=1 represents that there are other robots within the range of the robot's own sensors; Organize...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More