

Data driving method of fault detection and fault separation of drone flight control system
A flight control system, fault detection technology, applied in the direction of electrical testing/monitoring
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
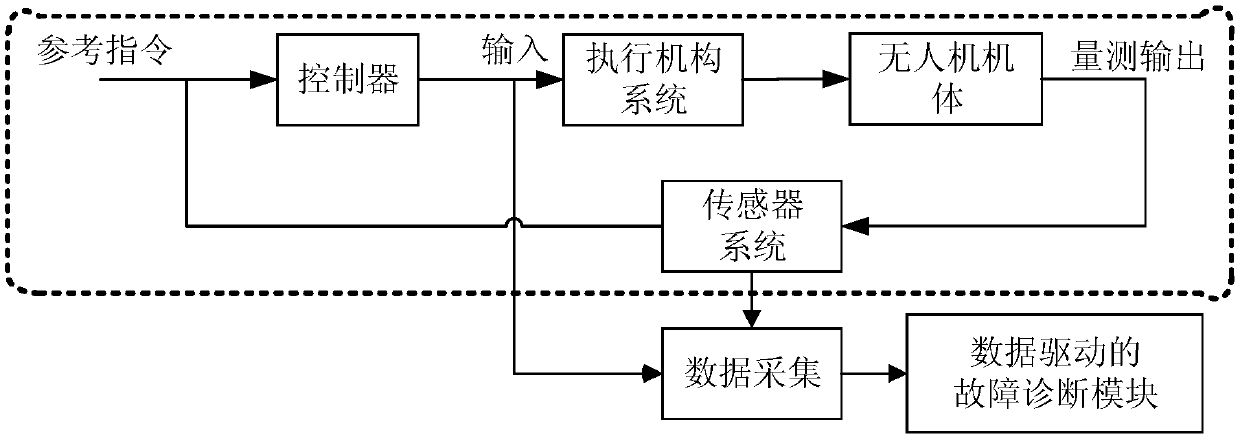
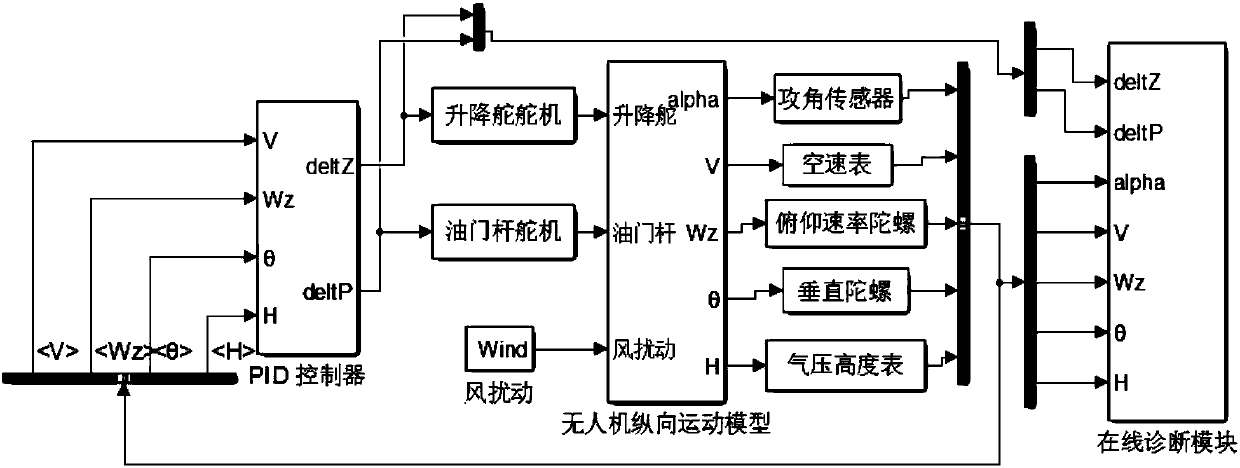
[0174] The present invention takes a UAV longitudinal flight control system as an example to analyze data-driven fault detection and separation, and firstly explains the UAV longitudinal flight control system:
[0175] The input variable is the elevator deflection δ e and throttle stick deflection δ p , which are used to control the velocity channel and altitude channel respectively; the sensors are configured as an angle-of-attack sensor, airspeed tube, pitch gyro, vertical gyro and barometric altimeter to measure the angle of attack α, air-time Velocity V, pitch rate q, pitch angle θ, and height H, and assume that the system sensor has no hardware redundancy, that is, a physical quantity is measured by only one sensor.
[0176] Considering that the UAV is inevitably affected by disturbance factors such as atmospheric turbulence and gusts during flight, the longitudinal motion equation of the UAV in the changing wind field is established as follows:
[0177]
[0178]Amon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More