

A Fault Detection and Separation Method for UAV Longitudinal Flight Control System Based on Nonlinear Adaptive Observer
A control system and longitudinal flight technology, applied in the field of fault detection and separation of UAV longitudinal flight control system, can solve the problems of poor matching effect, complex fault performance mechanism, and ineffective detection and separation of complex nonlinear control systems And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
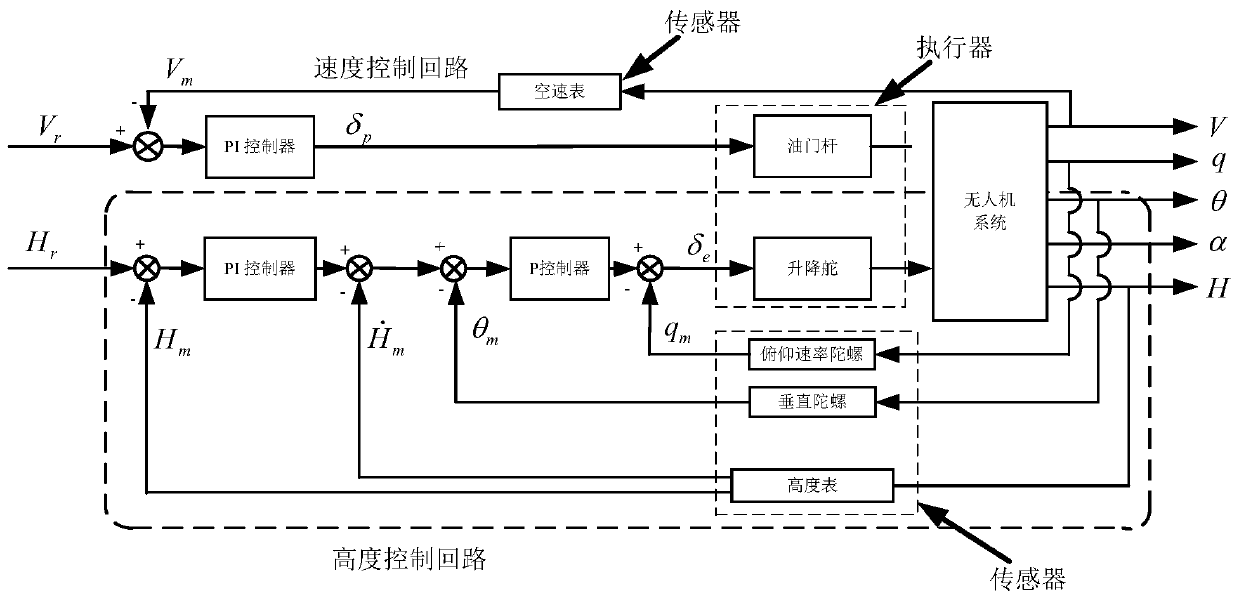
[0124] The invention takes a certain type of unmanned aerial vehicle longitudinal flight control system as an example to detect and separate faults of related actuators and sensors. The UAV longitudinal flight control system that the present invention relates to is as figure 1 As shown, its actuators include the elevator and throttle sticks, and its sensors include the airspeed indicator, pitch rate gyro, vertical gyro, and altimeter. Considering the influence of wind disturbance, the UAV longitudinal dynamics model is established as follows:
[0125]
[0126] Among them, V represents the airspeed, α represents the angle of attack, q represents the pitch rate, θ represents the pitch angle, H represents the altitude, m represents the mass of the aircraft, g represents the acceleration due to gravity, and w z is the wind speed in the Z-axis direction, and are the wind speed gradients in the X-axis direction and the Z-axis direction, P is the engine thrust, D is the air r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More