Trajectory tracking control method, device and system of variable-parameter open-frame type ocean underwater robot
An underwater robot, trajectory tracking technology, applied in the direction of control/regulation system, non-electric variable control, height or depth control, etc., to improve the response speed and improve the accuracy of trajectory tracking control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
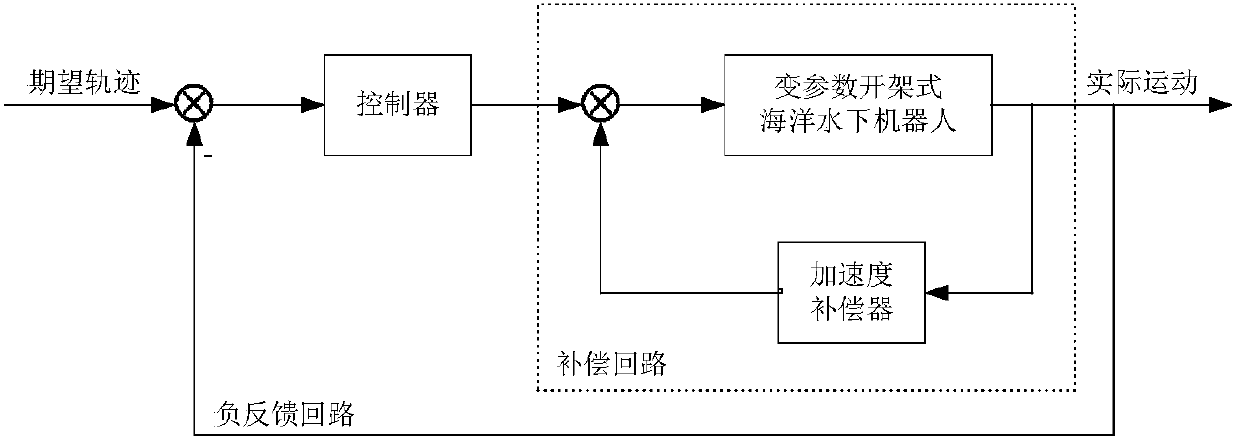
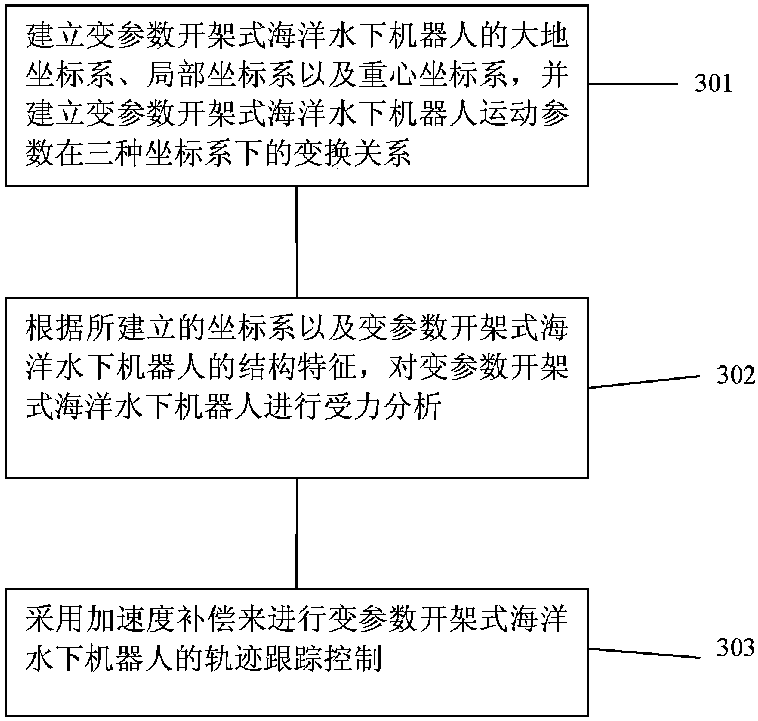
[0027] The specific implementation of a variable parameter open-frame marine robot trajectory tracking control method is as follows:
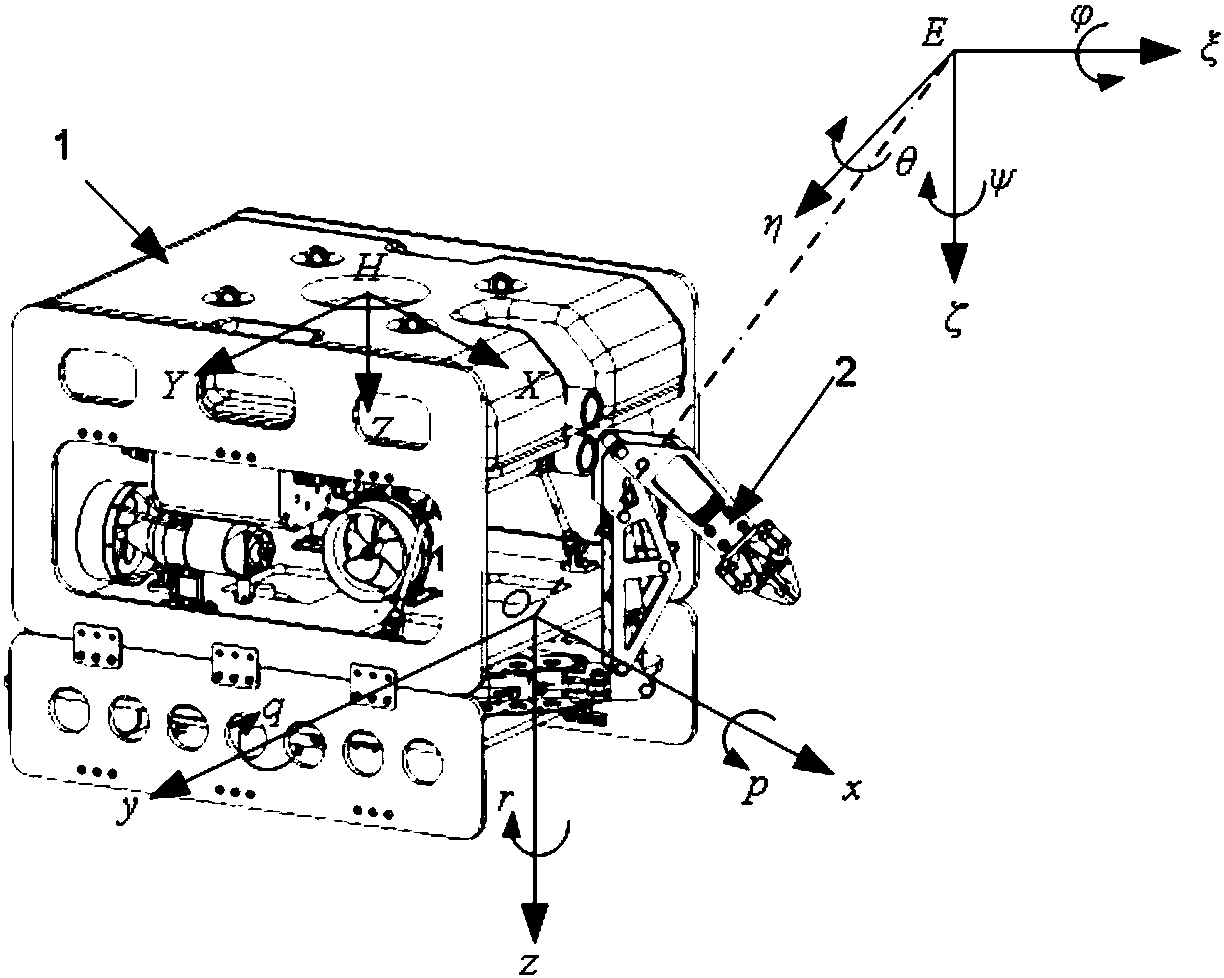
[0028] Such as figure 1 As shown, the local coordinate system H-XYZ is established on the motion platform 1 to represent the parameters of the variable-parameter open-frame marine underwater robot and to parameterize the center of gravity of the mechanical arm 2. The origin H is located at the center of gravity of the upper surface of the marine robot, and the X-axis Along the forward direction of the marine robot, the Y-axis is perpendicular to the X-axis and points to the right side of the robot, and the Z-axis is perpendicular to the XY plane and points to the bottom plate of the robot. When establishing the local coordinate system of the variable-parameter open-frame marine underwater robot motion platform, a geodetic coordinate system with the earth as the reference object is established at the same time. Vertically downwards in the verti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com