

Robot charging alignment method and system based on infrared signal
An infrared signal and alignment system technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as movement, robot orientation, and affecting charging success rate, so as to improve alignment accuracy, improve charging efficiency, and ensure charging effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
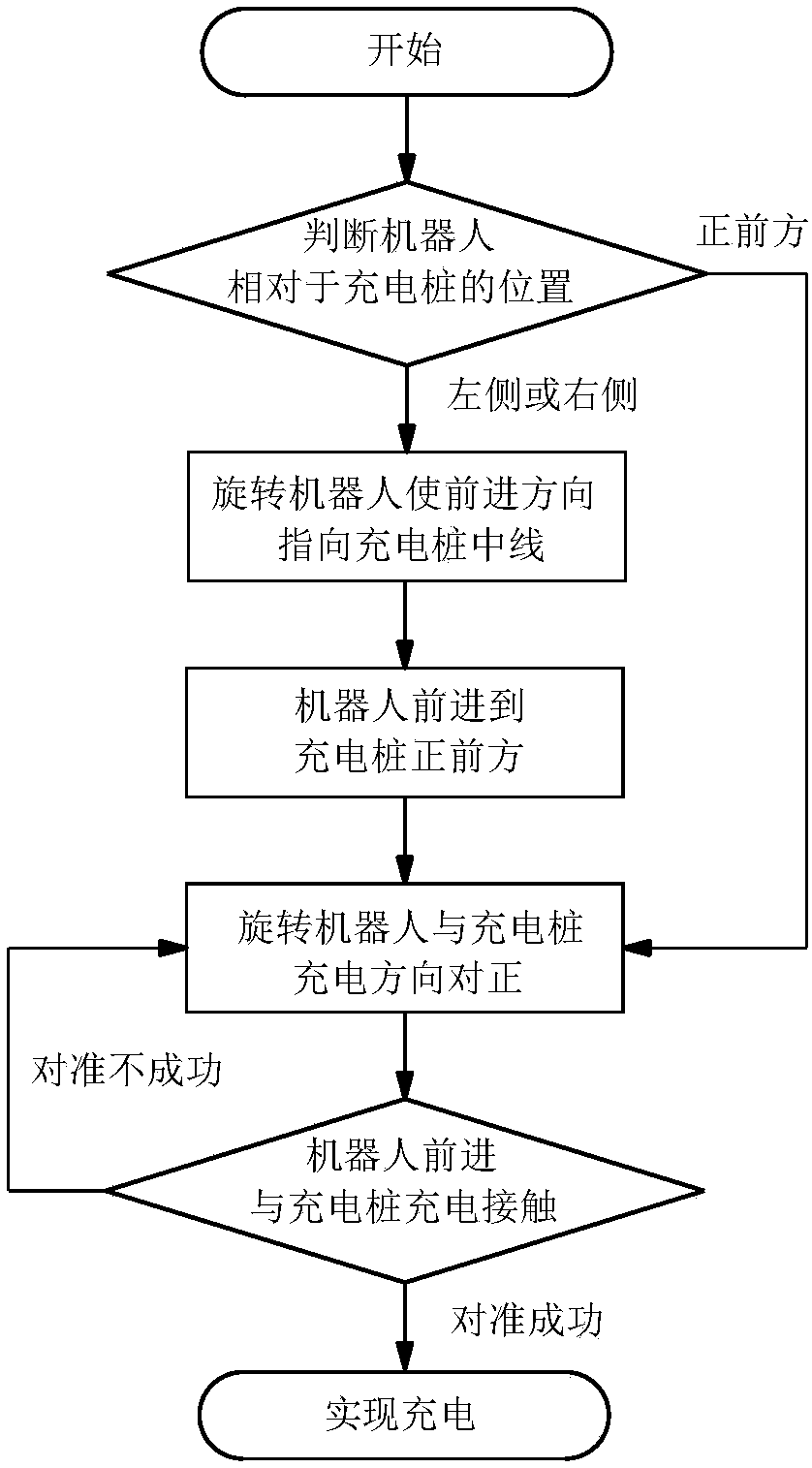
[0034] The method process of the present invention is as figure 2 shown.
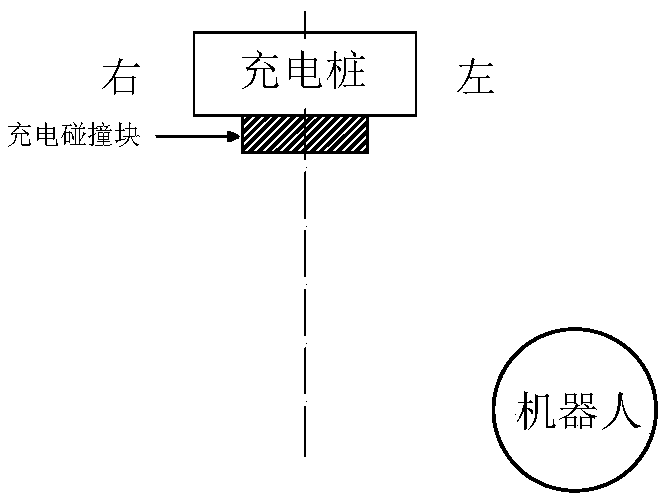
[0035] 1) Determine the position of the robot relative to the charging pile. If the robot is located directly in front of the charging pile, go to step 3); if the robot is located on the left or right side of the charging pile, rotate the robot so that the forward direction of the robot points to the center line of the charging pile , and then the robot advances to the front of the charging pile;
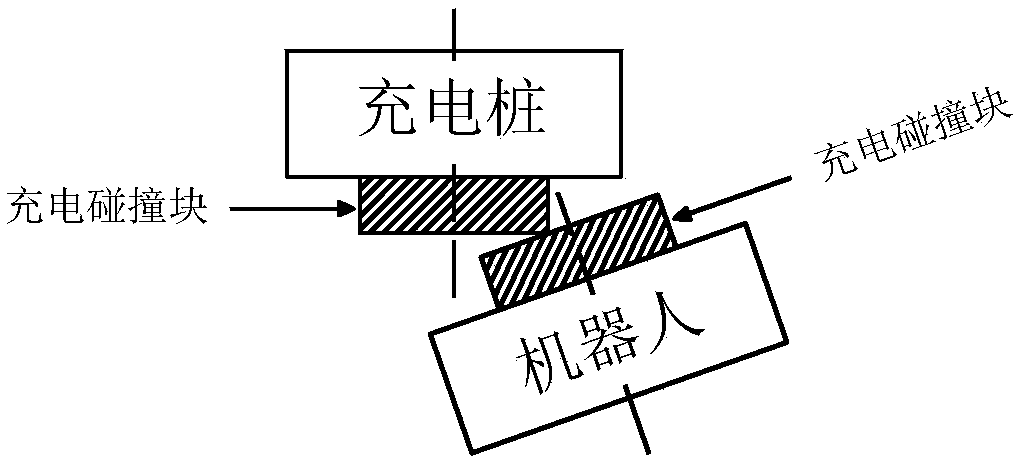
[0036] 2) Rotate the robot so that the robot is aligned with the charging direction of the charging pile, and enter step 3);
[0037] 3) The robot moves forward and contacts the charging port of the charging pile, and judges whether the charging port of the robot is aligned with the charging port of the charging pile. If it is aligned, go to step 4); otherwise, return to step 2);
[0038] 4) Charging is successful.
[0039] a. Determine the position of the robot relative to the charging pile
[0040] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More