

Industrial pole-climbing robot with obstacle-surmounting function
A robot and functional technology, applied in the field of robots, can solve the problems of large volume, difficult to realize, complex mechanical structure and control scheme, etc., and achieve the effect of increasing application occasions, simple mechanical structure, and large locking capacity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
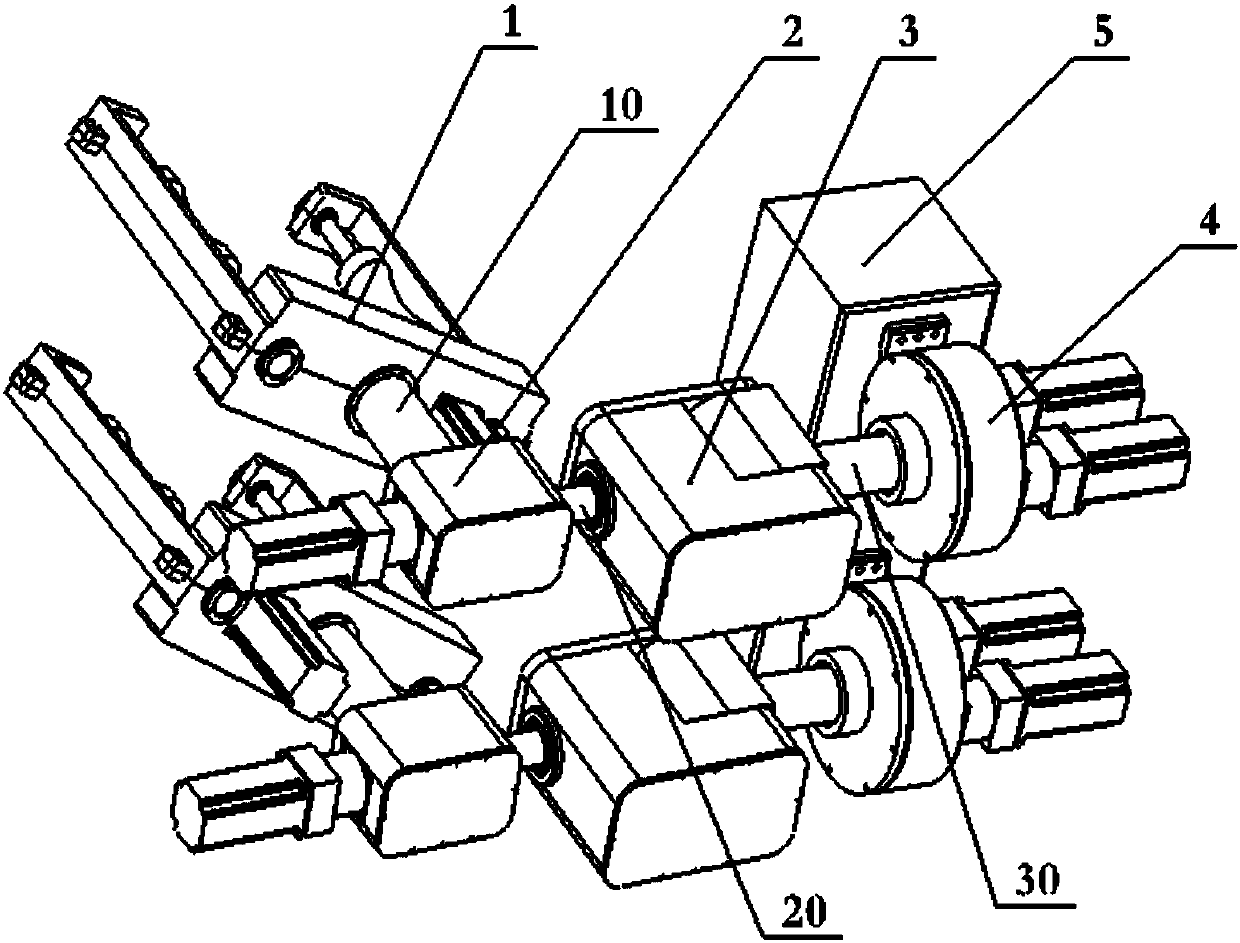
[0037] see figure 1 , an industrial pole-climbing robot with obstacle-surmounting function, including two mechanical arms installed on the main body 5, each of which is composed of a crawling guiding mechanism 1, a self-locking driving mechanism 2, a rotating and disengaging mechanism 3, a transmission Organization 4 consists of;
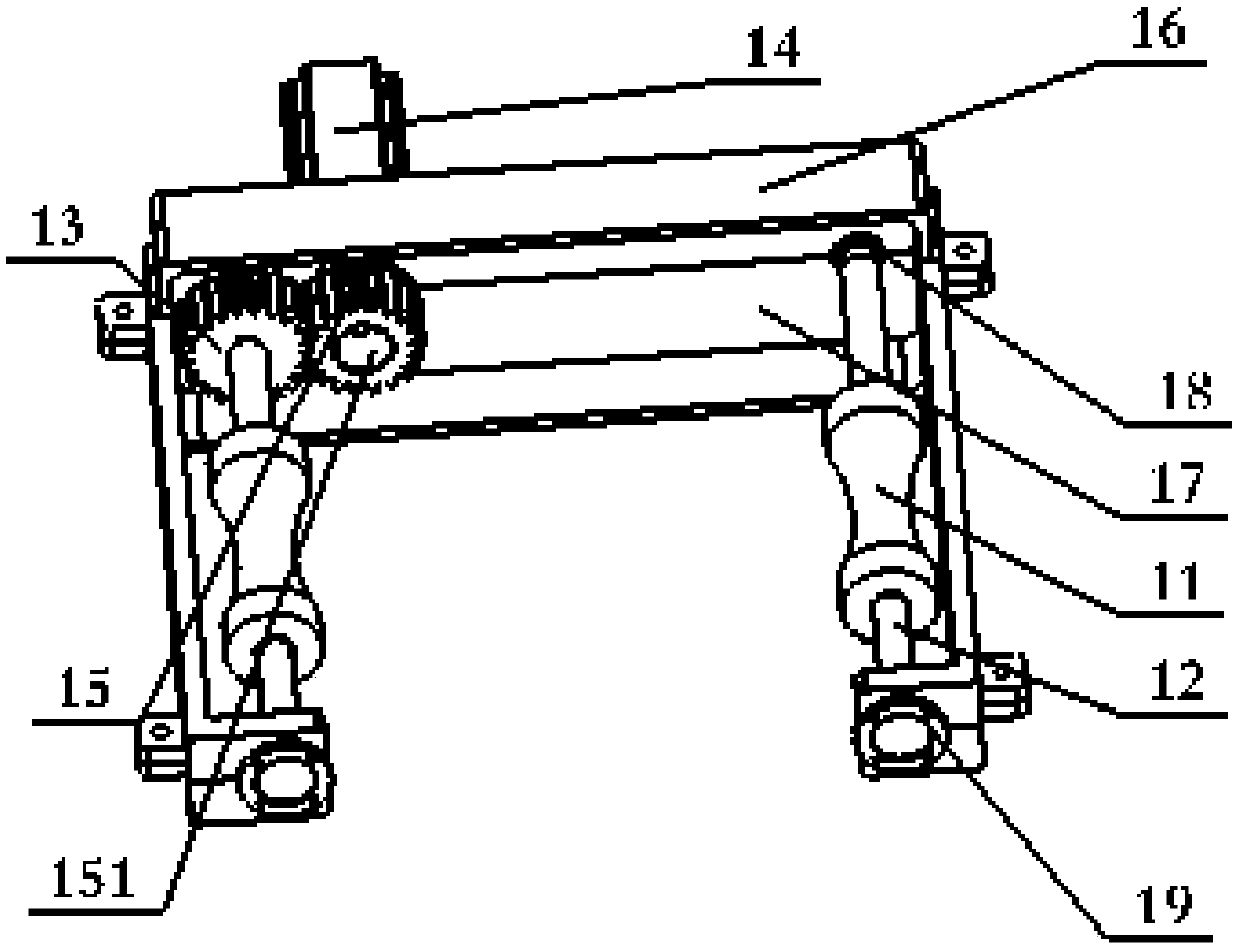
[0038] see figure 2 , The crawling guide mechanism is composed of a pair of rubber wheels 11, support shaft 12, gear II 13, servo motor 14, gear I 15, upper casing 16, lower casing 17, bearing I 18, bearing end cover 19. A rubber wheel 11 is installed on the middle part of the support shaft 12; the other end of the support shaft 12 is connected with the gear 13; the gear 13 is meshed with the gear 15; the gear 15 is connected with the sleeve I 151 arranged on the extension shaft of the servo motor 14; W...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More