

Method and system for preventing collision of robot based on current method
A current method and robot technology, applied in the field of robots, can solve problems such as damage to life and property safety, and achieve the effects of avoiding loss of life and property, improving judgment speed, and realizing automatic monitoring.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
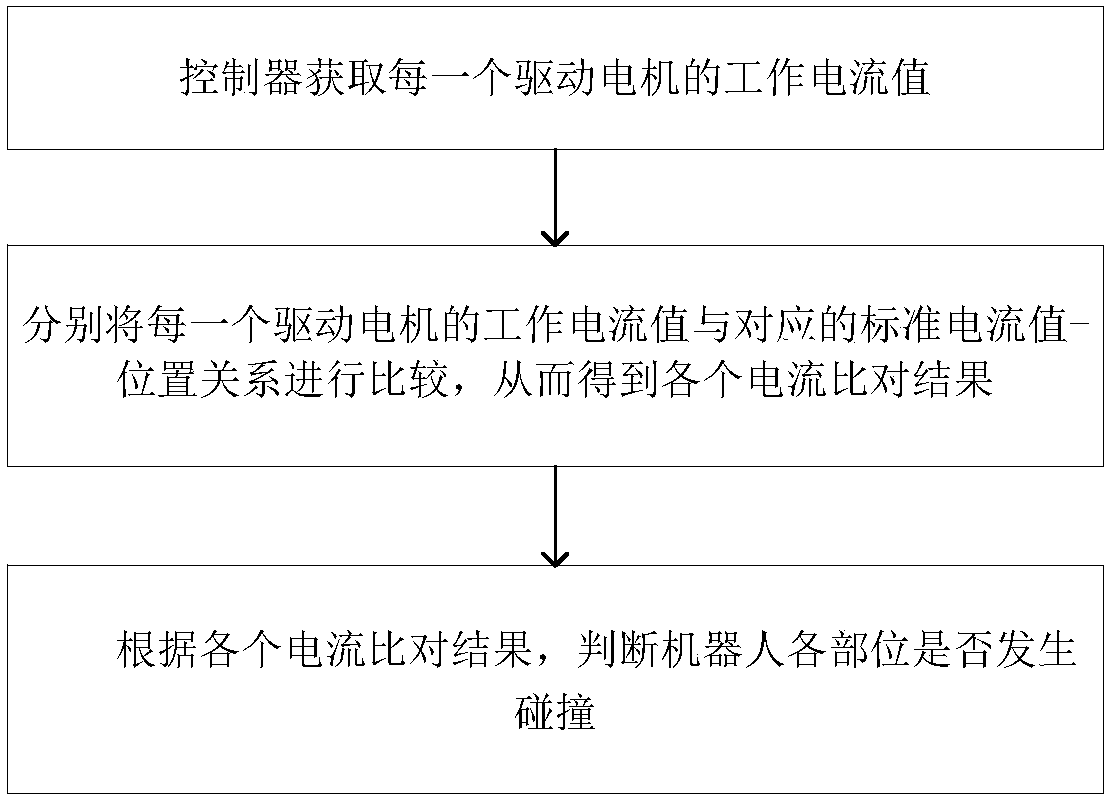
[0041] The present invention discloses a robot anti-collision method based on the current method, such as figure 1 shown, including the following steps:
[0042] The controller obtains the working current value of each drive motor;
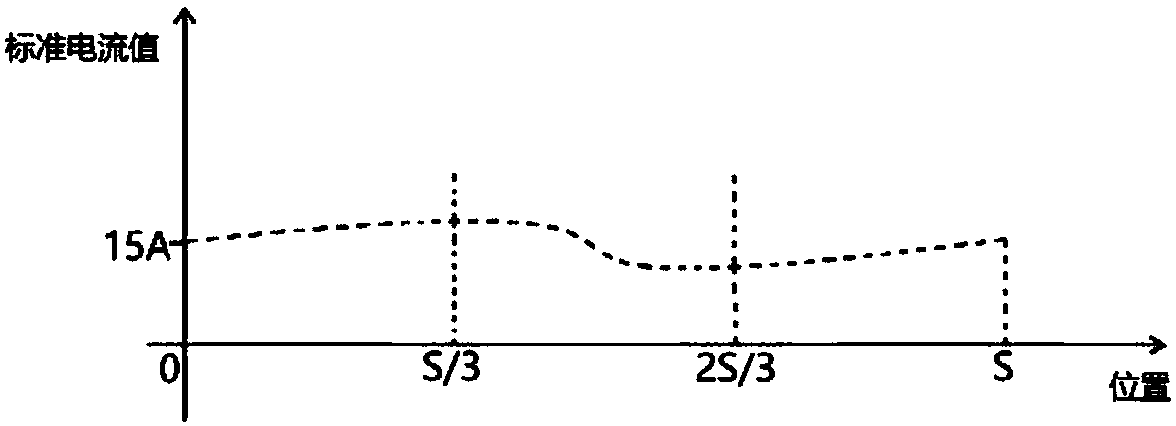
[0043] The controller respectively compares the working current value of each driving motor with the corresponding standard current value-position correspondence, so as to obtain each current comparison result;
[0044] The controller judges whether each part of the robot collides according to each current comparison result.
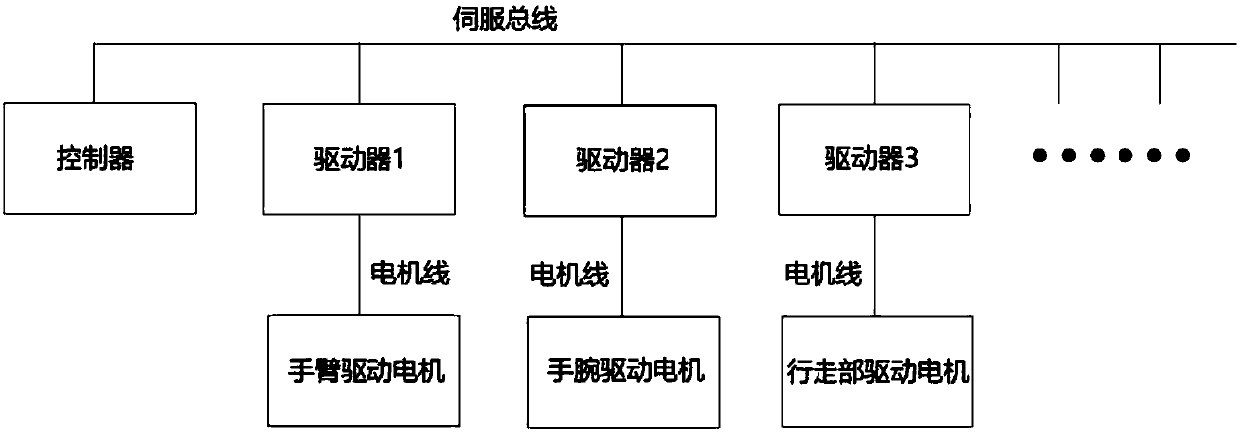
[0045] The principle of the above method is: the robot includes multiple parts such as base, waist, arm, wrist, hand and walking part. These parts are also called actuators, and multiple motors are set to drive these actuators respectively. Therefore, a The robot is equipped with multiple drive motors, such as figure 2 As shown, for example, the first motor used to drive the arm, the second motor used to drive the wrist,...
Embodiment 2
[0083] A robot anti-collision system based on the current method disclosed by the present invention, such as figure 2 As shown, it includes: a plurality of driving motors, the plurality of driving motors are respectively connected to drivers, and the drivers are connected to controllers;
[0084] The controller is used to obtain the operating current value of each driving motor, and then compare the operating current value of each driving motor with the corresponding standard current value-position curve, so as to obtain each current comparison result, and then, according to each Compare the results of the current to judge whether there is a collision between the various parts of the robot.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More