

Unmanned aerial vehicle formation keeping control method based on self-adaptive control
A technology of adaptive control and maintaining control, applied in the direction of non-electric variable control, control/regulation system, three-dimensional position/course control, etc., can solve difficult closed-loop system stability and robustness, lack of UAV model, formation Keep the control system difficult to work and other problems, to achieve the effect of eliminating formation error, suppressing the influence of disturbance, and good formation maintaining ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
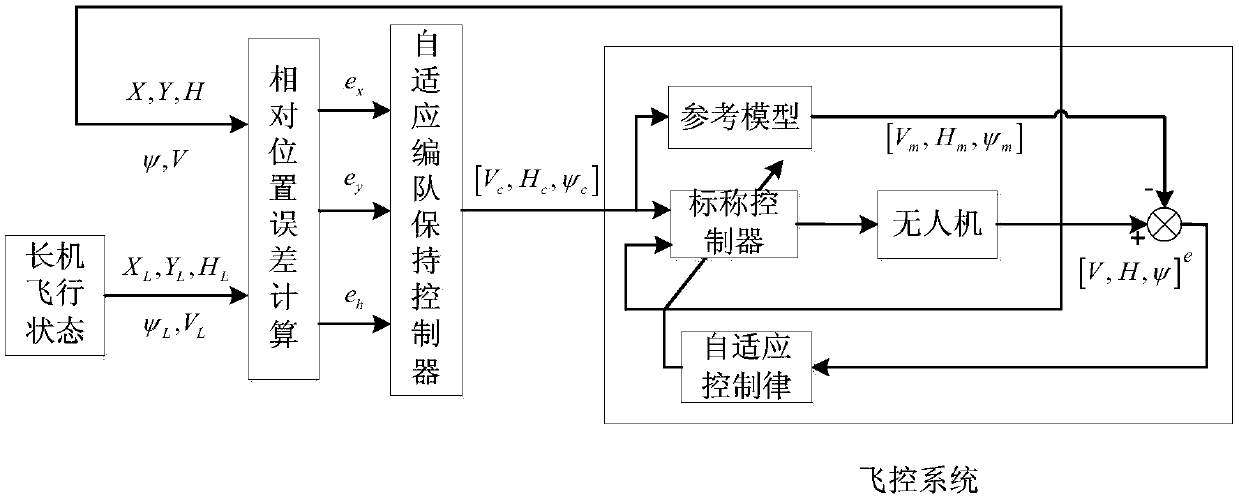
[0037] The embodiment of the present invention provides a UAV formation maintenance control method based on adaptive control, and the principle schematic diagram is as follows figure 1 As shown, the method is realized based on the UAV formation keeping control system based on adaptive control. The UAV formation keeping control system includes the UAV flight control system based on adaptive control and the formation keeping controller based on adaptive control. The flight control system is designed using the model reference adaptive method of state feedback output tracking, including the reference model, nominal controller and adaptive control law, the input value include...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More