

SLAM-based indoor positioning method
An indoor positioning and pose technology, which is applied in image data processing, instruments, calculations, etc., can solve the problem of not being able to know the device pose, and achieve the effect of increasing real-time and robustness, and optimizing the camera pose.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
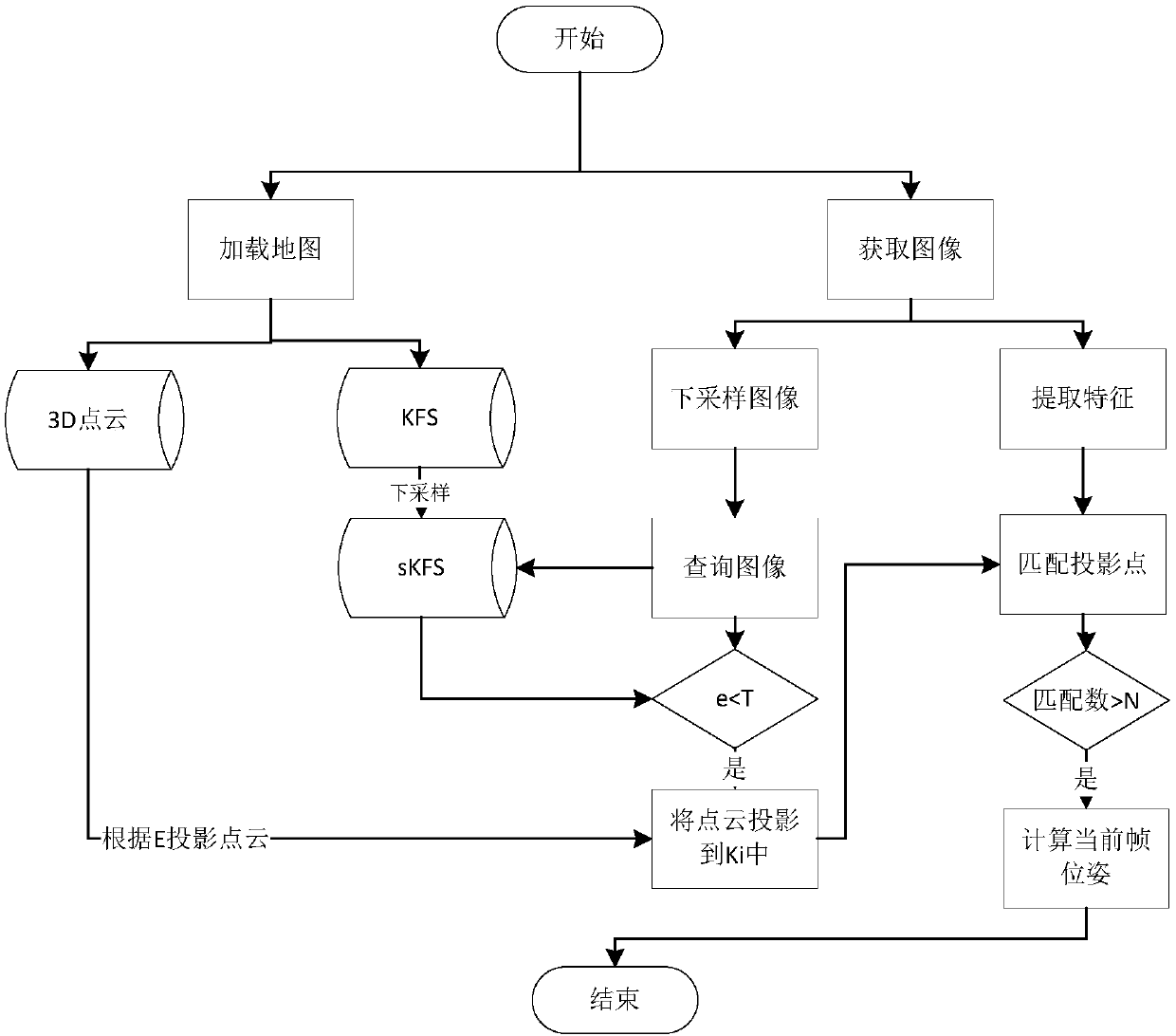
[0023] Such as figure 1 As shown, a kind of SLAM-based indoor positioning method disclosed by the present invention comprises the following steps:
[0024] Step 1, load the SLAM map, get the key frame set KFS and 3D point cloud, KFS contains the pose E of each key frame i , downsampling the key frame set KFS to obtain sKFS, downsampling to 40*30 in this embodiment;
[0025] Step 2, using the FAST algorithm to extract the corner points of the input image as feature points, and down-sampling the input image to obtain a thumbnail, the size of which is 40*30 in this embodiment;
[0026] Step 3, use the ESM-tracking algorithm to find the change matrix H between each key frame in sKFS and the input image, H contains the rotation and translation transformation information between two-dimensional images;
[0027] Step 4, align each sKFS with the input image, and calculate the minimum error e i , if the minimum error e i is less than the threshold T, then it is considered that the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More