

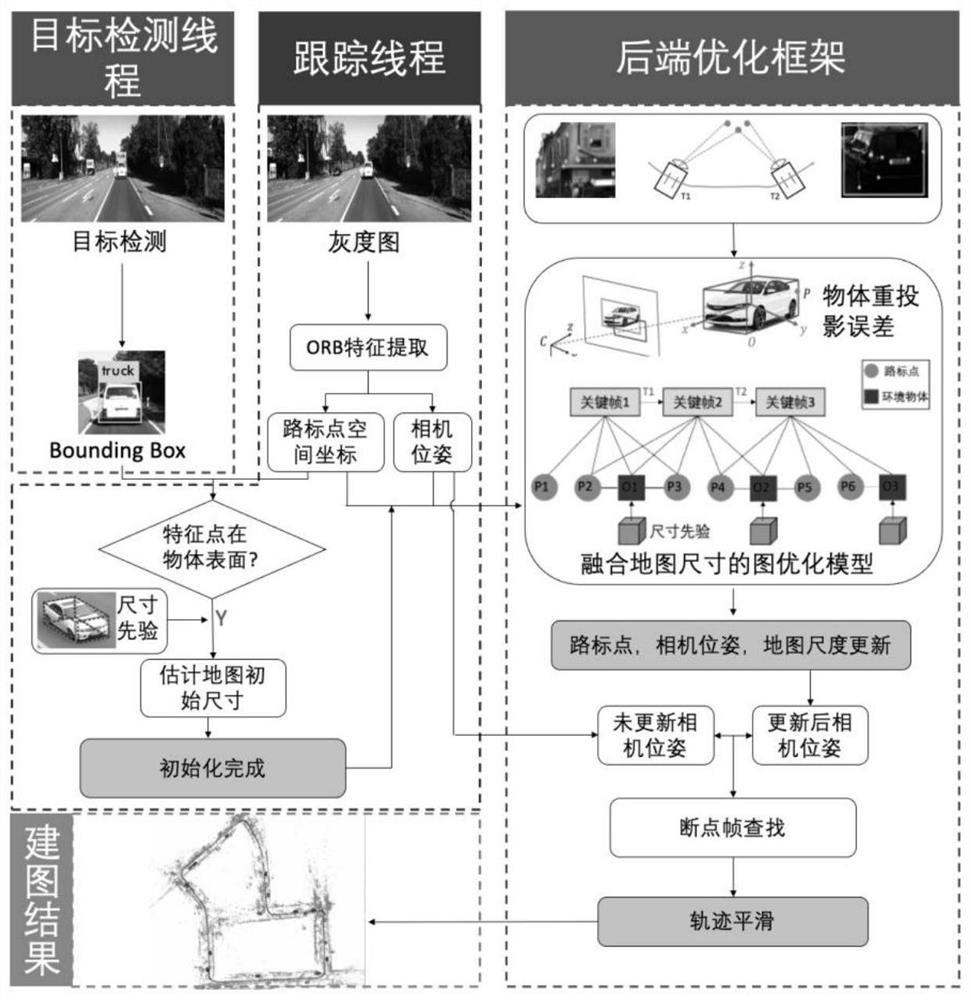
Monocular vision SLAM method based on object size prior information
A technology of prior information and monocular vision, applied in the field of intelligent robots, can solve the problems of limited scope of application, low portability and low generalization of scale recovery methods, and achieves elimination of local map drift and strong system portability. , Improve the effect of mapping accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
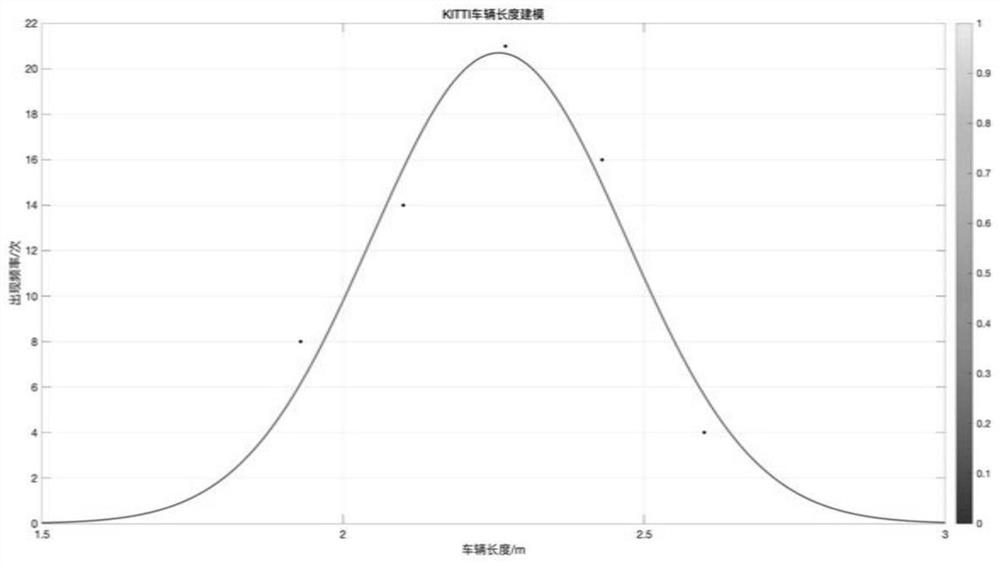
[0018] In order to overcome the shortcomings of the mobile robot with a monocular camera as the only sensor in the scale perception of scene exploration, the embodiment of the present invention provides a monocular vision SLAM method based on the prior information of the object size. Real-time and high-precision requirements, to achieve high-precision real-time online scale recovery, and at the same time widely applicable, strong portability; such a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More