

Path planning method, device and computer equipment for unmanned vehicles
A technology for unmanned vehicles and path planning, applied in the direction of measuring devices, control devices, vehicle components, etc., can solve the problems of inability to guarantee driving safety and inability to ensure that vehicles comply with traffic rules, and achieve the effect of ensuring driving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0023] The path planning method for an unmanned vehicle provided by various embodiments of the present application can be applied to a control terminal, and the control terminal can be a mobile terminal or a vehicle-mounted terminal on an unmanned vehicle. Wherein, the mobile terminal may specifically be a mobile phone, a tablet computer, or a notebook computer.
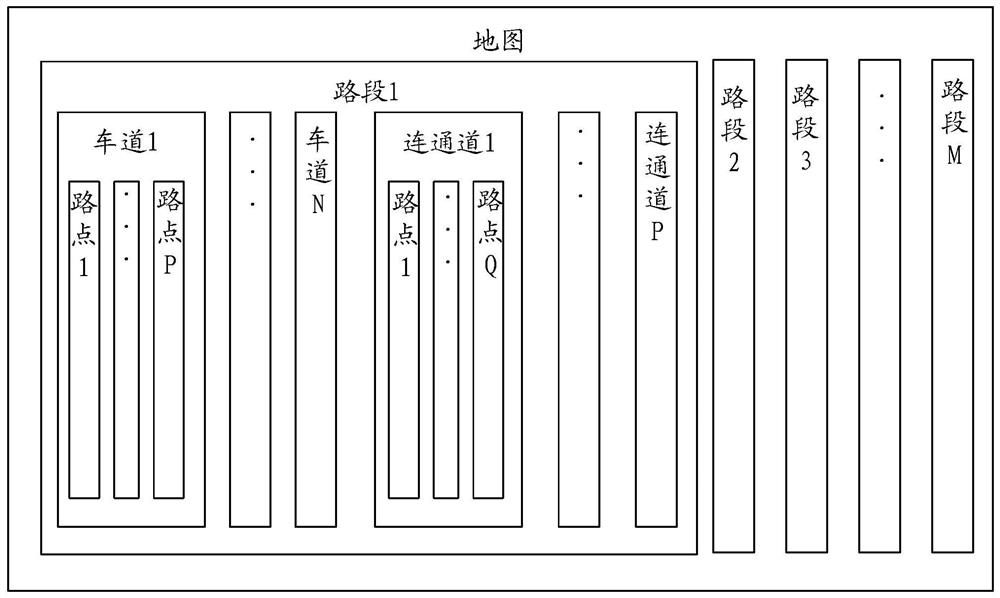
[0024] In practical applications, before performing the method steps in each embodiment of the present invention, it is necessary to collect map data and create a high-precision map.
[0025] Specifically, a dedicated map data collection...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More