

A spraying control method for unmanned aerial vehicles
A spray control and unmanned aerial vehicle technology, applied in aircraft parts, launch devices, transportation and packaging, etc., can solve problems such as general detection reliability, achieve high detection accuracy and prevent accidental spraying.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
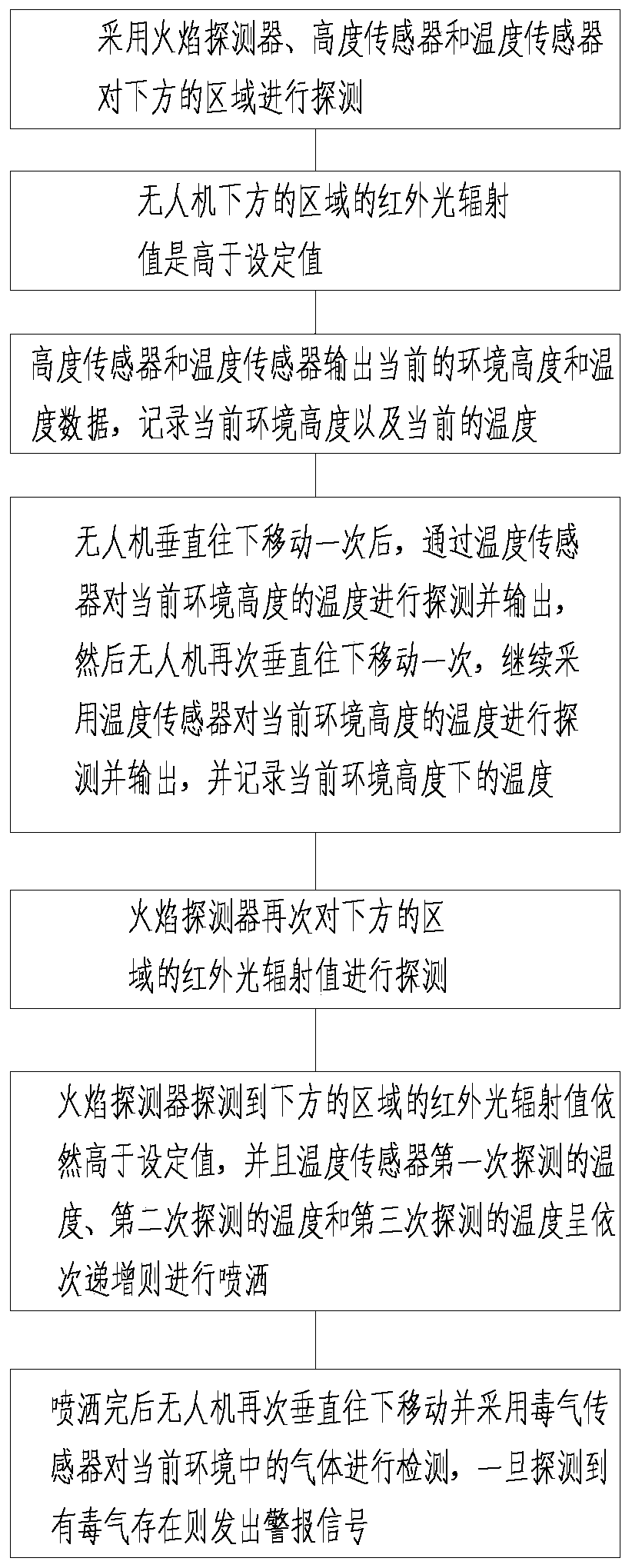
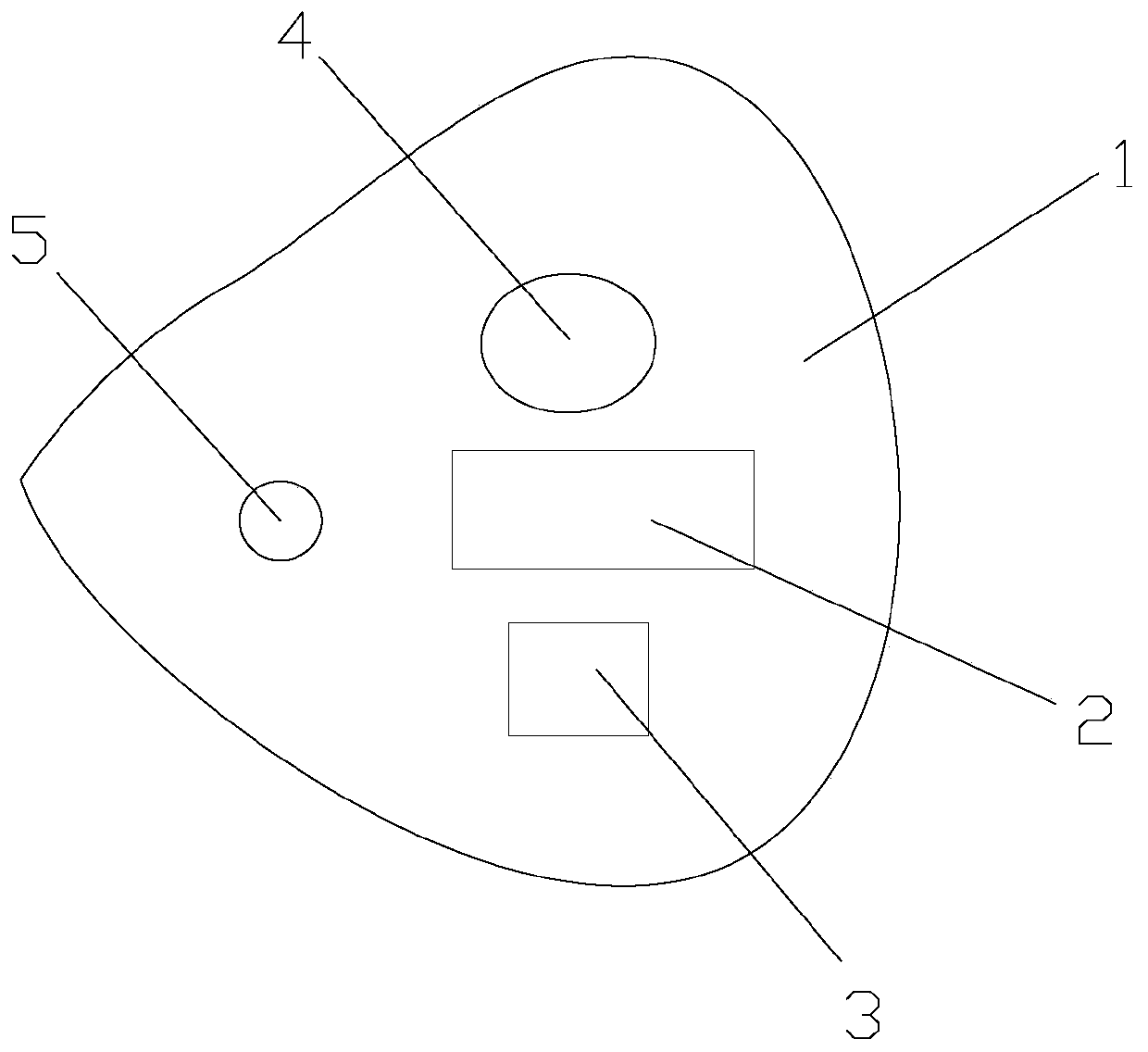
[0033] like figure 1 Shown, a kind of spraying control method of unmanned aerial vehicle comprises the following steps:
[0034] 1) Use flame detectors, height sensors and temperature sensors to detect the area below;
[0035] 2) The infrared radiation value of the area below detected by the flame detector is higher than the set value;
[0036] 3) The altitude sensor and temperature sensor output the current environmental altitude and temperature data, and record the current environmental altitude and current temperature;
[0037] 4) After the UAV moves down vertically once, the temperature at the current ambient height is detected and output by the temperature sensor, and then the UAV moves vertically down once again, and the temperature sensor continues to detect the temperature at the current ambient height and output, and record the temperature at the current ambient altitude;
[0038] 5) The flame detector detects the infrared radiation value of the lower area again; ...
Embodiment 2
[0045] like figure 1 Shown, a kind of spraying control method of unmanned aerial vehicle comprises the following steps:
[0046] 1) Use flame detectors, height sensors and temperature sensors to detect the area below;
[0047] 2) The infrared radiation value of the area below detected by the flame detector is higher than the set value;
[0048] 3) The altitude sensor and temperature sensor output the current environmental altitude and temperature data, and record the current environmental altitude and current temperature;
[0049] 4) After the UAV moves down vertically once, the temperature at the current ambient height is detected and output by the temperature sensor, and then the UAV moves vertically down once again, and the temperature sensor continues to detect the temperature at the current ambient height and output, and record the temperature at the current ambient altitude;
[0050] 5) The flame detector detects the infrared radiation value of the lower area again; ...
Embodiment 3
[0057] like figure 1 Shown, a kind of spraying control method of unmanned aerial vehicle comprises the following steps:
[0058] 1) Use flame detectors, height sensors and temperature sensors to detect the area below;
[0059] 2) The infrared radiation value of the area below detected by the flame detector is higher than the set value;
[0060] 3) The altitude sensor and temperature sensor output the current environmental altitude and temperature data, and record the current environmental altitude and current temperature;
[0061] 4) After the UAV moves down vertically once, the temperature at the current ambient height is detected and output by the temperature sensor, and then the UAV moves vertically down once again, and the temperature sensor continues to detect the temperature at the current ambient height and output, and record the temperature at the current ambient altitude;
[0062] 5) The flame detector detects the infrared radiation value of the lower area again;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More