

A six-degree-of-freedom self-reconfigurable parallel spraying robot
A spraying robot and self-reconfiguration technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor dynamic response, bulky whole mechanism, and large end load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions of the present invention will be further described below in conjunction with the drawings and embodiments.
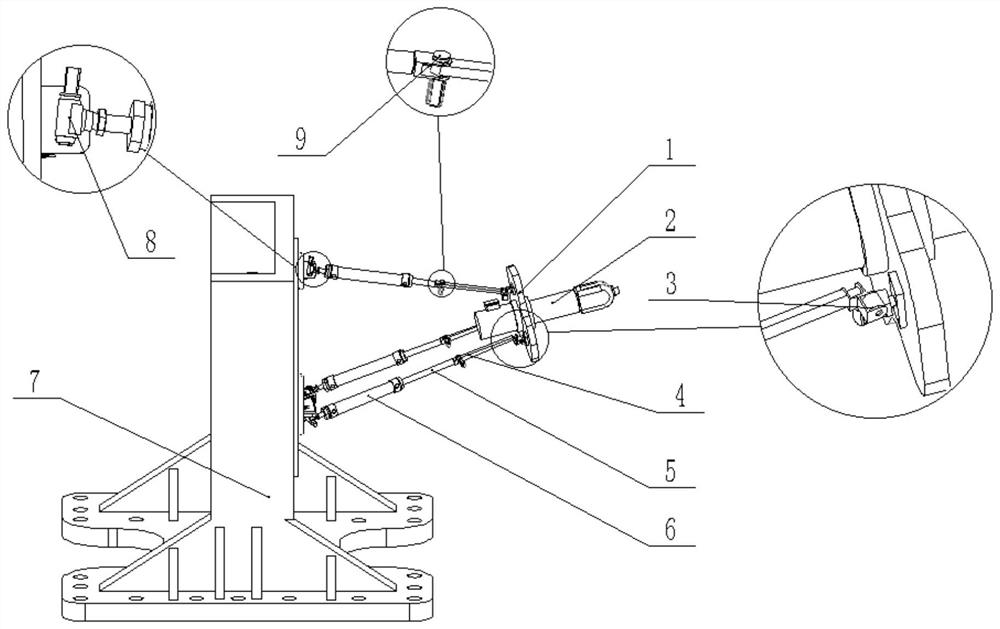
[0028] Such as Figure 1 to Figure 9 As shown, the six-degree-of-freedom self-reconfiguration parallel spraying robot of the present invention consists of a nozzle 2, a nozzle support platform 1, three nozzle hinges 3 with identical structures, three identical long poles 4, a brake 9, three It consists of a cylinder block 6 of the same specification, three support hinges 8 with the same structure and a frame 7. The specific structure and connection relationship are as follows:
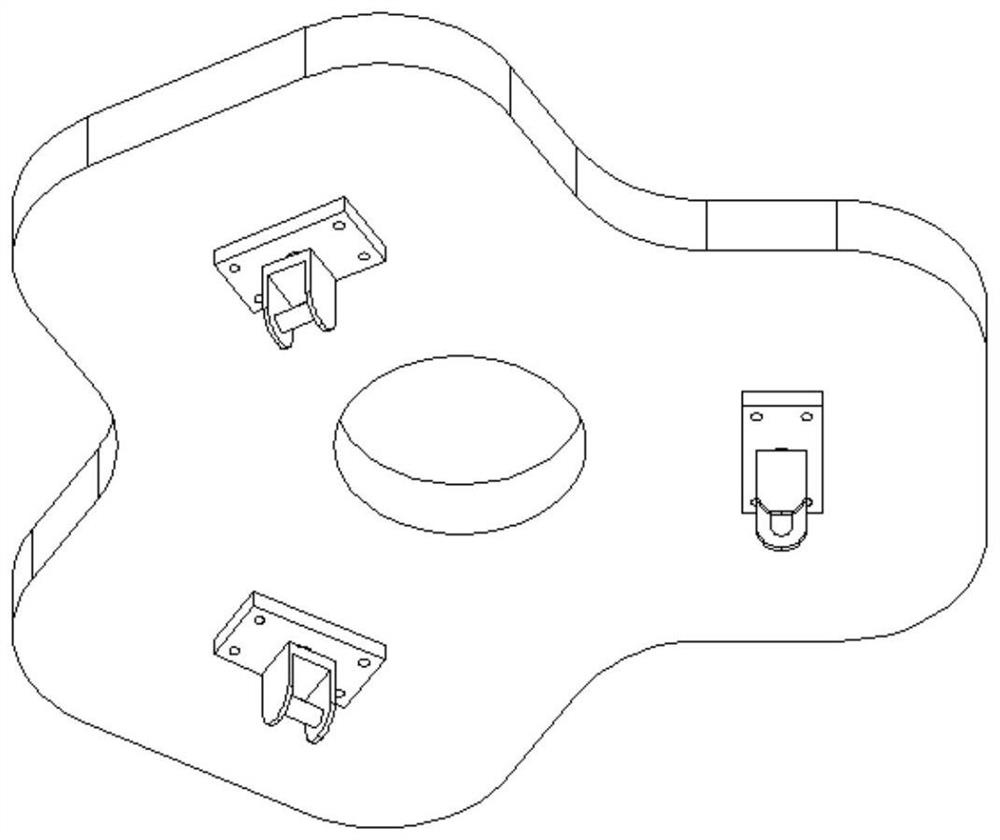
[0029] The nozzle 2 and the nozzle support platform 1 are fixedly connected together, and the two are relatively stationary, and the side of the nozzle support platform 1 close to the frame 7 is connected with three nozzle hinges 3;
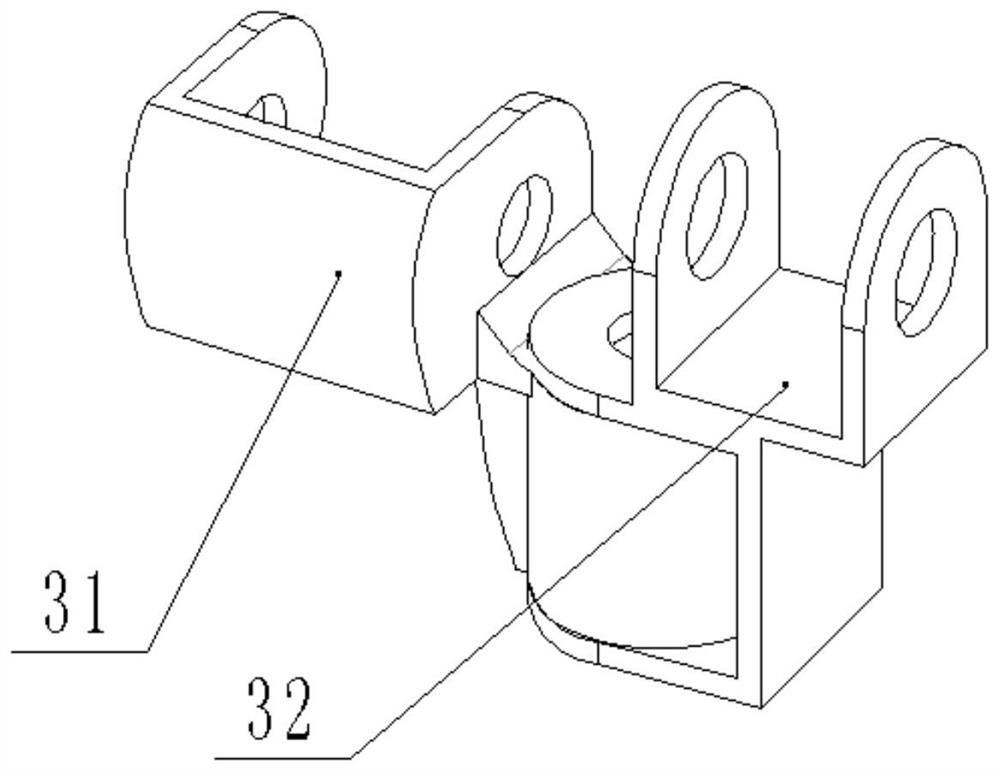
[0030] The three nozzle hinges 3 with identical structures are all composed of a rotating head 31 and a rotating sleeve 32, one end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More