

Integrated underwater steering engine device
An underwater rudder and integrated technology, applied in rudder steering and other directions, can solve the problems of no belt, low precision, and affecting the control accuracy of underwater navigation of autonomous underwater robots, and achieve small size and high control precision. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
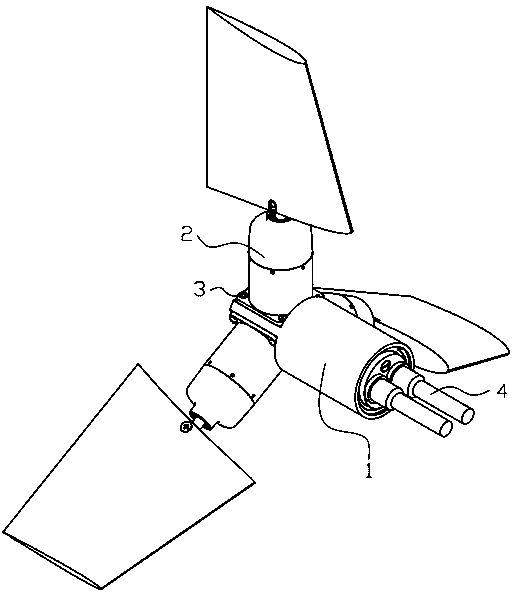
[0027] Such as figure 1 As shown, the integrated underwater steering gear device of the present invention includes a steering gear base 1 and three identical steering gears 2. An oil-filled pressure compensation mechanism is arranged inside the steering gear base 1. The oil is selected from transformer oil. The steering gear base Two identical ultra-small watertight connectors 4 are installed on one end of the seat 1, and the ultra-small watertight connectors 4 are used for power supply and signal detection of the steering gear; each steering gear 2 is fixed to the steering gear base 1 by four screws 4; three After the steering gear 2 is fixed, it is arranged in a Y shape, and the spacing of each steering gear 2 in the circumferential direction is 120°.
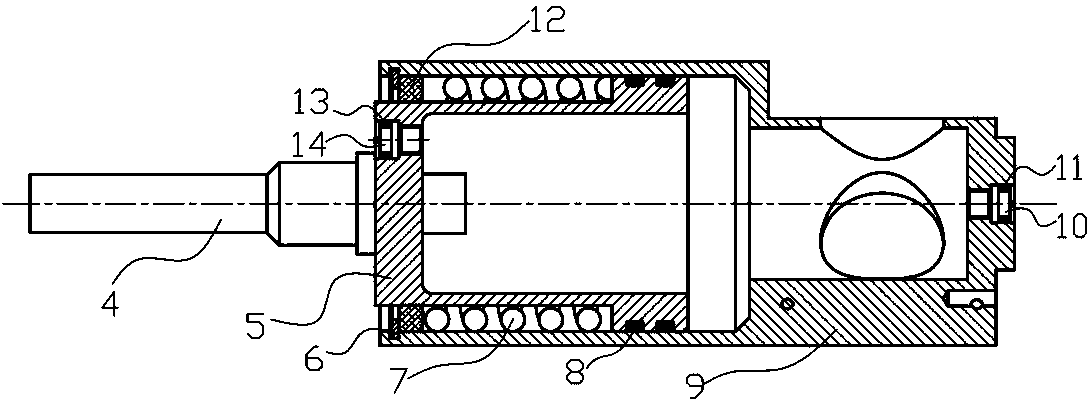
[0028] Such as figure 2 As shown, the housing 9 in the steering gear base 1 can be divided into two sections in appearance, one section is cylindrical in shape for realizing oil filling pressure compensation; the outer surf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More